- 오는 2024년 '유로파 클리퍼' 미션 런칭
 |
||
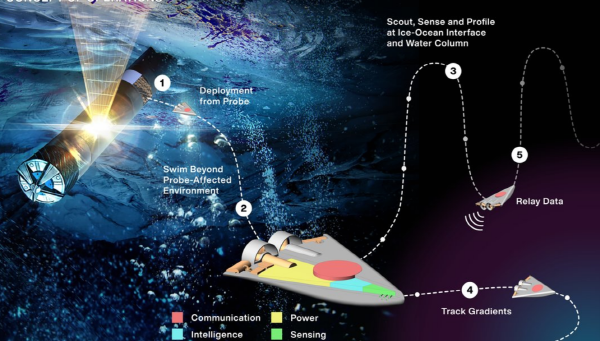
| ▲ 크리오봇에서 소형 로봇인 '스윔'이 빠져나와 행성 해양 탐사에 나선다(이미지=NASA) | ||
목성의 위성인 유로파나 토성의 위성 엔켈라두스에는 얼음 표면 밑에 광대한 해양이 존재할 가능성이 제기되고 있다. 만일 이들 행성에서 많은 양의 물이 발견된다면 외계 생명체도 존재할 수 있을 것이다.
향후 휴대폰 크기의 로봇 무리들이 목성의 위성인 유로파(Europa)나 토성의 위성 엔켈라두스(Enceladus)의 수마일 두께 얼음 표면 밑으로 들어가 외계 생명체 탐색 등 해양 탐사 활동을 벌인다. 얼음을 녹일 수 있는 장비를 탑재한 탐사 로봇 크리오봇(Cryobot) 안에는 소형 로봇들이 가득 차 있고, 해양을 탐험하기 위해 크리오봇에서 빠져나와 물속을 헤엄쳐 나간다.
이같은 행성 해양 탐사에 관한 비전은 미 항공우주국(NASA) 제트추진연구소(JPL) 로봇공학자인 '에산 샬러(Ethan Schaler)'가 제시한 것이다. 그는 최근 나사의 ‘혁신적 첨단개념(NIAC·Innovative Advanced Concepts)’ 프로그램으로부터 60만달러의 자금을 지원받았다. 그는 2021년에 로봇 탐험의 실현 가능성과 설계 옵션을 연구하기 위해 1차로 12만 5천달러의 자금을 지원받았다. 에산 샬러 등 JPL 연구진은 향후 2년간 3D 프린팅 기술을 활용해 로봇 프로토타입을 제작하고 테스트할 계획이다.
 |
||
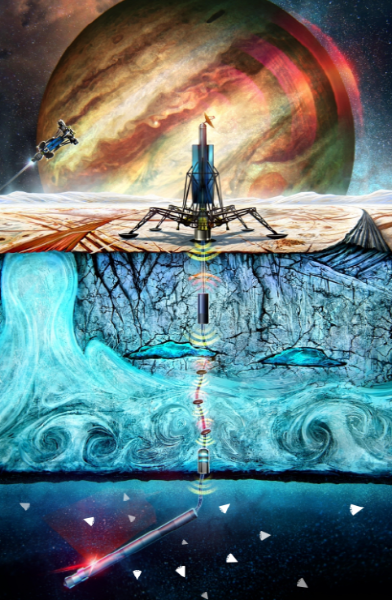
| ▲ 탐사선으로부터 수중 탐사 로봇이 하강하는 모습(이미지=NASA) | ||
에산 샬러가 구상한 소형 로봇은 ‘스윔(SWIM·Sensing With Independent Micro-Swimmers)’으로 명명됐다. 스윔은 기존의 행성 해양 탐사 로봇보다 훨씬 작고, 클리오봇 내부에 훨씬 많은 로봇을 탑재할 수 있다는 점에서 혁신적인 개념으로 인식되고 있다.
이들은 행성 해양 탐사 장치의 과학적 도달 범위를 넓힐 수 있으며, 바다를 품고 있는 천체에 대한 잠재적인 거주 가능성을 평가하고, 외계 생명체의 증거를 탐지할 가능성을 높일 수 있다.
JPL 연구팀이 구상하고 있는 스윔 로봇은 길이 12cm, 부피 3~5c㎡로 쐐기 모양을 하고 있다. 이 로봇들은 직경 5cm인 ‘크리오봇(Cryobot)’ 안에 48개 정도 들어갈 수 있다. 크리오봇은 얼음 덩어리를 녹일 수 있는 탐사 로봇으로, 과학 장비들이 탑재돼 행성 내부 해양 데이터를 수집하는 역할을 한다.
나사는 오는 2030년 목성의 위성인 유로파에 도착하는 것을 목표로 2024년 ‘유로파 클리퍼(Europa Clipper)' 미션을 런칭한다는 계획이다. 행성의 해양 세계를 탐사하기 위한 크리오봇의 개념은 나사의 유로파 과학탐사 프로그램인 '세사미(SESAME·Scientific Exploration Subsurface Access Mechanism for Europa)' 프로그램과 다른 나사 기술 개발 프로그램을 통해 개발되고 있다.
야심찬 목표를 내세우고 있는 스윔 로봇의 개념은 과학을 증진시키면서 탐사의 위험을 줄이는 데 있다. 크리오봇은 통신 테더(tether)를 통해 행성 착륙선에 연결되며, 착륙선은 지구상의 임무 관제사들과 접촉하게 된다.
JPL 연구진은 스윔 군집 로봇을 행성에 보냄으로서 크리오봇이 독자적으로 활동할 때 보다 행성의 해양 환경에 대해 보다 많이 관찰하고 데이터를 수집할 수 있을 것으로 기대하고 있다.
장길수 ksjang@irobotnews.com






