- 다양한 방식으로 재구성할 수 있는 유연한 시스템
 |
||
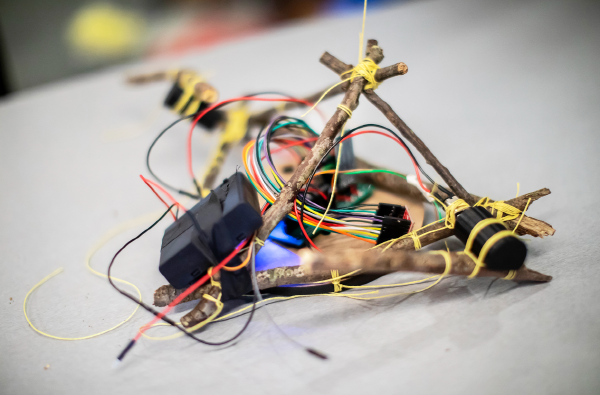
| ▲ 펜실베니아대 연구진이 개발한 스틱봇(사진=펜실베니아대) | ||
미국 펜실베니아대 연구진이 나뭇가지들을 엮어 모듈러 로봇인 ‘스틱봇’(StickBot)을 만들었다고 밝혔다.
펜실베니아대 GRASP랩(General Robotics, Automation, Sensing & Perception Lab) 소속 박사과정 학생인 데빈 캐롤(Devin Carrol)은 올 여름 자신의 아파트를 나오면서 땅에 떨어져있는 나뭇가지들을 보고 로봇을 만들어보겠다는 생각을 했다. 0.5인치 두께에 어른 손 길이인 나뭇가지들의 껍질을 벗겨내고 회로, 액추에이터, 마이크로컨트롤러, 모터 드라이버 등과 연결해 스틱봇을 만들었다. 이 로봇은 4개의 AA배터리로부터 전원을 공급받아 기어다니거나 물건을 집는 동작을 수행할 수 있다.
데빈 캐롤이 설계한 앱을 통해 스틱봇을 조작하는 게 가능하다. 기어다니기 모드(crawler mode)와 잡기 모드(grasper mode)를 지원한다. 모듈러 로봇인 스틱봇은 자신의 형태를 다양한 방식으로 재구성할 수 있는 유연한 시스템이다. 스틱봇 구성 요소는 필요에 따라 추가, 조정 및 폐기된다.
데빈 캐롤 지도 교수인 재미 한인 로봇과학자 마크 임(Mark Lim) 교수는 17년동안 펜실베니아대에서 근무했으며, 현재 GRASP랩을 책임지고 있다. 마크 임 교수는 “모듈형 로봇의 다재다능함은 기술 발전에 관해 많은 가능성을 제시한다”며, “로봇이 모양을 바꿀 수 있다면 더 많은 가능성을 줄 것”이라고 말했다.
데빈 캐롤은 스틱봇과 함께 직사각형 몸체와 두개의 큰 바퀴를 갖고 있는 아이스봇(IceBot)도 만들었다. 얼음으로 만들어진 이 로봇은 얼음으로 만들어진 최초의 로봇으로 2020년 기네스북에 등재됐다. 캐롤은 이 기술이 언젠가 남극이나 얼음이 있는 달에서 임무를 수행하는 데 활용될 수 있기를 기대하고 있다.
캐롤은 스틱봇을 통해 제작 비용을 낮추고, 일련의 작업을 수행할수 있는 단순한 시스템을 만드는데 초점을 맞추고 있다. 그는 “우리는 나뭇가지나 막대기를 많이 가지고 있고, 이것들을 이용해 다양한 구성의 트러스 구조물을 조립할 수 있다. 그렇게 함으로써 우리는 크롤러 로봇이나 그리퍼 로봇 등을 만들 수 있다”고 말했다. 나뭇가지들은 주변에서 쉽게 구할 수 있으며 재사용도 가능하다고 덧붙였다.
장길수 ksjang@irobotnews.com






