- 미 버몬트대ㆍ터프츠대 연구진,PNAS에 연구성과 발표
 |
||
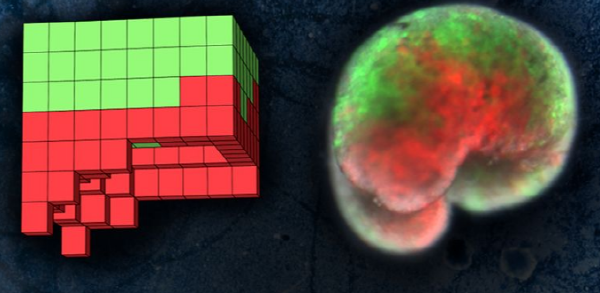
미국 버몬트대학과 터프츠대학 연구진이 개구리의 줄기세포를 이용해 ‘생체 로봇’을 개발했다고 밝혔다. 일종의 살아있는 로봇으로 스스로 상처를 치유하고 자신의 에너지를 이용해 움직이는게 가능하다.
‘더 가디언’ 등 매체에 따르면 미국 버몬트대학과 터프츠대학 연구진은 아프리카발톱개구리(학명:제노푸스 라에비스,Xenopus laevis)‘의 배아에서 줄기세포를 추출한 후 피부세포와 심장 세포로 분화시키는 방식으로 독자적인 움직임이 가능한 소형 생체 로봇을 개발했다고 밝혔다. 살아 있는 소형 로봇의 이름은 아프리카발톱개구리의 학명을 차용해 ’제노봇(xenobot)‘이라고 명명됐다. 연구팀은 연구 성과를 미국국립과학원회보(PNAS)에 게재했다.
연구진이 개발한 생체 로봇은 다양한 형태로 만들 수 있다. 예를 들어 2개의 뭉뚱한 다리를 갖추고 있으며 가슴 부분을 밀어 전진할 수 있는 로봇이 있고, 중간에 주머니로 변하는 구멍을 갖고 있어 매우 가벼운 물체를 싣고 이동할수 있는 로봇도 있다.
 |
||
| ▲ 제노봇이 실제 움직이는 모습 | ||
터프츠대학 ‘알렌 디스커버리 센터’ 마이클 레빈 소장은 “생체 로봇은 지구상에 존재하지 않았던 완전히 새로운 생명의 형태”라며 “그들은 살아 있고 프로그래밍이 가능한 조직체”라고 말했다. 일반적으로 로봇 과학자들은 강도와 내구성을 위해 금속과 플라스틱을 선호하지만 버몬트대와 터프츠대 연구팀은 생체 조직을 이용해 로봇을 만들었다는 설명이다.
생체 조직을 이용해 만든 살아 있는 로봇은 손상을 입더라도 스스로 치유되며, 자연의 유기체가 죽으면 부패하는 것처럼 임무를 완수한후에는 해체된다. 연구팀은 이번에 개발한 ‘생체 로봇’ 기술을 더 발전시키면 해양 생태계를 오염시키고 있는 마이크로 플라스틱을 정화하거나 독성 물질을 찾아 분해할수 있으며 몸안에 약물을 넣어 질병을 치료하는데도 활용할 수 있다고 설명했다.
생체 로봇은 길이가 1mm 미만으로 수퍼컴퓨터상에서 돌아가는 ‘진화 알고리즘’에 의해 설계됐다. 500~1천개에 달하는 피부와 심장 세포로부터 시뮬레이션 작업을 통해 무작위적인 3차원 형상을 생성하고 가상의 환경에서 테스트가 이뤄졌다. 심장 세포로 만들어진 로봇은 자발적으로 수축과 이완을 하기 때문에 마치 소형의 엔진처럼 작용하면서 에너지를 다 소진할때까지 로봇을 움직이도록 만들 수 있다. 로봇의 에너지는 1주일에서 10일 정도 로봇이 살아있게 만든다.
 |
||
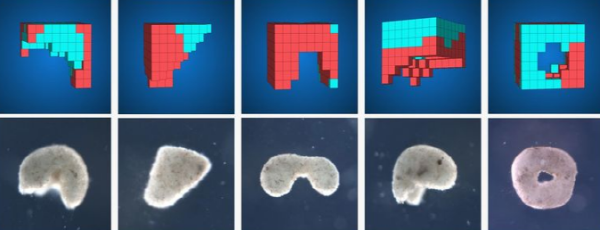
| ▲ 제노봇의 다양한 형태 | ||
연구자들은 소수의 로봇 디자인을 고르기전에 컴퓨터 시뮬레이션 작업을 통해 100 개 정도의 변형을 만들도록 했다. 이어 핀셋과 감염 차단 도구들을 이용해 아프리카발톱 배아로부터 줄기세포를 추출한 초기 단계의 피부와 심장 세포 형상을 만들었다.
이어 개구리 세포의 생명을 유지하기 위해 물이 들어있는 접시에 로봇을 풀어놓았다. 이들 로봇들은 직선으로 이동하거나 원을 그리면서 이동하는 게 가능했다. 혈관세포, 신경시스템, 감각 세포로 제노봇을 만들면 초기 상태의 눈을 만드는 것도 가능하다. 포유동물에서 세포를 추출하면 물이 아니라 마른 땅에서 생존할 수 있는 로봇을 만드는 것도 가능하다는 설명이다. 이번 연구는 미 국방부 산하 방위고등연구계획국(DARPA)의 자금 지원으로 이뤄졌다.
장길수 ksjang@irobotnews.com






