'젊은 로봇공학자(Young Robot Engineer)' 코너는 한국로봇학회와 로봇신문이 공동으로 기획한 시리즈물로 미래 한국 로봇산업을 이끌어 갈 젊은 로봇 공학자를 발굴해 소개하는데 있다.
32번째 인터뷰는 DGIST 윤동원 교수다. 윤 교수는 1976년 경남 마산 출생으로 부산대에서 기계공학으로 학사, GIST에서 기전공학으로 석사, KAIST에서 기계공학으로 박사 학위를 받았다. 2004년 국방과학연구소 연구원, 2015년 UC Berkley 박사후연구원, 2005년부터 2016년 9월 30일까지 한국기계연구원 선임연구원을 거쳐 2016년 10월 1일부터 현재까지 DGIS에서 조교수로 재직하면서 다양한 연구활동을 펼치고 있다.
2007년 대한기계학회 우수논문상, 2008년ㆍ2015년 한국기계연구원 특별공로상, 학술상, 2018년 ICMT 국제학술대회 우수논문상, 2019년 한국로봇학회 미래과학자 최우수논문상, 학부 최우수 논문상, 2019년 육군교육사 드로봇 챌린지 혁신노력상 수상, 2018ㆍ2019년 DGIST UGRP 우수협업상 등을 수상했다.
 |
||
| ▲DGIST 윤동원 교수 | ||
Q. 최근 하고 계신 연구가 있다면 소개 부탁드립니다.
저는 현재 DGIST 로봇공학과 바이오 로보틱스 및 메카트로닉스 연구실(BRM Lab.)을 운영하고 있으며, 주로 수행하고 있는 연구분야는 크게 2가지로 ‘자연모사로봇’을 중심으로 한 로봇 분야와 ‘메카트로닉스’ 분야의 연구를 수행하고 있습니다. 자연모사 로봇은 동물과 같은 자연물의 구조와 운동을 분석하여 로봇의 설계에 응용하는 분야로, 최근 관련하여 연구중인 주제는 4족 보행로봇, 뱀로봇, 새로봇, 수중 로봇 등에 대해 새로운 아이디어를 가지고 활발히 연구중입니다. 산업통상자원부 지원으로 재난/구조 현장에 투입할 목적으로 뱀로봇 개발 과제에 참여중이며, 다양한 물체를 파지하기 위한 로봇 그리퍼 및 센서 개발 과제에도 참여중입니다. 메카트로닉스 분야로는 전자기 액추에이터, LVDT 센서와 같은 로봇 요소부품 기술과 나노/마이크로 공정을 위한 장비에 대한 연구도 수행중에 있습니다.
Q. KAIST에서 “수직방향 위상차 꼬리지느러미를 가지는 물고기 로봇에 관한 연구”로 박사 학위를 받았습니다. 논문이 어떤 내용인지 간단한 소개 부탁 드립니다.
이 논문은 물고기와 같은 수중동물의 유영을 관측하고, 보다 효율적이고 효과적인 추진 방식을 제안하고, 이를 수중로봇에 적용한 연구입니다. 특히, 몇몇 물고기가 물속에서 유영하는 것을 자세히 관찰하면, 꼬리를 단순히 좌우로 흔드는 것이 아니라, 수직 방향으로 춤추듯 물결 형태의 운동도 함께 하는 것을 관찰 할 수 있습니다. 마치 여러명이 부채춤을 출 때 물결을 만드는 것과 유사하게 보입니다. 저는 이러한 운동이 물속의 추진에 어떠한 영향을 끼치는지가 궁금하였고, 이를 이론적으로 분석하였으며, 이러한 모션이 보다 효율적인 추진을 가능하게 할 뿐만 아니라, 로봇에게도 동역학적으로 안정적인 추진을 하게 한다는 것을 알게 되었습니다. 이 논문은 이론적 해석과 실험을 통하여 이러한 발견에 대해서 연구를 수행하였습니다.
 |
||
| ▲UGRP를 통해 함께 연구한 학부생들. UGRP: Undergraduate Group Research Program의 약어다. | ||
Q. 주요 관심분야 및 연구분야가 생체모사 로봇과 그리퍼 분야인 것 같습니다. 생체모사 로봇에 대한 최신 동향이라고 하면 어떠한 것이 있을까요?
생체모사로봇에서 항상 관심 있고, 최근에도 활발한 연구가 되고 있는 분야는 기존 로봇의 이동성을 향상시키는 연구라고 생각합니다. 예를 들어, 2족/4족 보행 로봇에 대한 연구가 있겠으며, 이를 통하여 기존의 휠 기반의 로봇이 극복하지 못하는 다양한 장애물을 극복하는 연구가 활발히 진행되고 있습니다. 이 분야는 오랫동안 국내외에서 연구되어 왔으며, 최근에는 기술적으로 성숙단계로 접어들어 곧 실용화가 많이 될 것으로 기대됩니다. 여기에 더하여, 높은 장애물을 한번에 뛰어 넘는 점핑 로봇 등 새로운 로봇 메카니즘에 대한 연구도 활발히 진행되고 있습니다.
또한, 최근에는 소프트 로봇기술이 자연모사 로봇 분야에 많이 적용되고 있습니다. 동물의 유연하고 복잡한 운동을 모사하기 위해서 기존의 링크-조인트 기반의 설계 보다는 다양한 재질과 구조를 이용한 소프트 로봇 기술이 더욱 적합한 경우가 많기 때문입니다.
 |
||
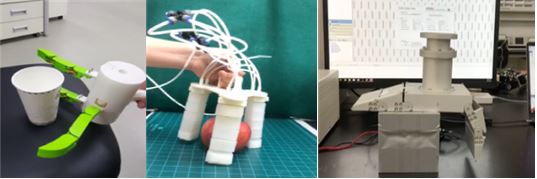
| ▲ 연구중인 다양한 그리퍼들 | ||
Q. 최근 그리퍼에 대한 중요성이 높아가고 있는데 어떤 그리퍼들을 주로 개발하셨고 용도는 무엇인지요?
최근 3년간 그리퍼에 대한 정부과제를 수행하면서 자연스럽게 그리퍼에 관련된 연구를 수행하게 되었으며, 첫 번째 수행한 과제는 비정형 다물체를 파지하기 위한 그리퍼로써, 모터기반으로 구동되는 그리퍼에 형상변형 소재 및 전자기력을 발생하는 필름을 부착하여, 다양한 형태와 재질의 물체를 파지하기 위한 그리퍼에 대한 연구를 수행하였습니다. 저희 랩은 주로 모터 기반의 다관절 그리퍼를 연구개발하고, 소재 관련 분야는 타 학교 및 연구소와 협력연구를 수행하였습니다.
 |
||
| ▲개발중인 다양한 자연모사 로봇들> | ||
두 번째 과제는 올해 새로이 시작된 과제로, 파지작업시 측정이 필요한 힘과 토크를 동시에 측정할 수 있는 센서와 다목적 툴팁이 구비된 새로운 그리퍼에 대한 연구를 수행하고 있습니다. 이 그리퍼 역시 다양한 비정형 물체를 하나의 그리퍼로 효과적으로 파지하기 위한 목적으로 연구중이며. 저희는 주로, 힘과 토크를 동시에 측정가능한 그리퍼용 센서모듈과 유연한 툴팁을 개발하기 위한 연구를 수행중에 있습니다.
 |
||
|
▲학부연구로 수행한 Quadnake2). Quadnake는: Quadrupedalism과 Snake에서 따온 말 |
||
Q. 다양한 분야의 로봇을 개발하고 계신데 가장 어려운 점은 무엇인가요?
로봇에 대한 연구는 항상 흥미롭고 재밌어서 크게 어려운 점은 없습니다. 다만, 최근 로봇에 관련된 여러 요소기술이 급진적으로 발전하고 있어, 새로운 기술을 익히고 배울 것이 너무 많은 것이 어려운 점인거 같습니다.
Q. UC버클리에서 포닥 연구원으로 1년동안 계셨는데 어떤 연구를 주로 하셨나요?
저는 EECS(전기컴퓨터공학과)의 론 피어링(Ron Fearing) 교수님 랩에서 연구를 수행하였습니다. 당시에 수행한 연구주제는 소형 곤충모사 모바일 로봇에 대한 것으로, 스마트 콤포지트 마이크로스트럭쳐스(smart composite microstructures)기법을 이용한 유연한 로봇 개발에 대한 연구를 수행하였습니다. 이러한 제작 기법을 이용하여 로봇을 만들면 유연하고 복잡한 링키지(linkage) 구조를 가진 로봇을 용이하게 제작할 수 있으나, 재질과 구조적인 특성상 가반하중이 작아지는 단점이 있습니다. 저는 이러한 단점을 극복하고자, 재료 및 복합적층 구조에 대한 연구와 로봇의 기구학적 구조의 개선에 대한 연구를 수행하였으며, 이러한 연구를 통하여 기존의 구조에 비해서 가반하중을 크게 향상시킬 수 있었습니다.
Q. 한국기계연구원에서도 11년간 선임연구원으로 계셨습니다. 주로 어떤 연구를 하셨는지요?
저는 기계연 로봇메카트로닉스 연구실에서 근무를 하였으며, 생체모사 로봇, 구난용 양팔 로봇, 모듈라 로봇, 로봇 그리퍼용 변위 센서 등 로봇 관련 연구와 모터, 전자석, MR 브레이크/댐퍼 등 액추에이터의 해석 및 설계, 유도가열 장비의 개발, 수질개선 장비개발 등 다양한 산업용 요소기술 및 장비 개발에 관한 연구를 수행하였습니다. 또한 다른 부서와의 협력연구도 활발히 하여, 자기부상열차의 부상 및 추진기의 해석 및 설계, 차량용 솔레노이드 구동기 등 다양한 연구를 수행하였습니다. 항상 개방된 마음으로 여러 협력 과제를 수행하여, 연구소 재직기간 동안 다양한 경험을 쌓았습니다. 이러한 다학제적 연구를 통하여 연구에 대해 보다 넓은 시야를 가질 수 있었고, 특히, 창의적인 아이디어 창출에 큰 도움이 되고 있습니다.
Q. 로봇을 하시게 된 동기가 있다면...
많은 로봇 공학자들의 동기가 될 것으로 추측되지만, 초등학교 시절 TV에서 방영한 로봇 관련 만화 및 영화의 영향을 크게 받았던 거 같습니다. 저희 어린 시절만 하더라도 TV에서 로봇 관련 만화를 많이 방영하여, 이를 보면서 로봇 개발에 대한 꿈을 키웠던거 같습니다. 이러한 막연한 동경과 꿈이 여러 진로를 결정시에 자연스럽게 로봇관련 분야를 지원하게 하면서 로봇공학자가 된 거 같습니다.
 |
||
|
▲연구실 학생들과 함께 |
||
Q. 연구자로서 앞으로의 꿈과 목표가 있다면?
크게 2가지가 있는데, 먼저 자연모사 로봇 분야를 꾸준히 연구하고 싶으며, 특히 이를 발전시켜 창의적이고 새로운 구조 및 원리의 로봇에 대한 연구를 수행하고 싶습니다. 이를 통하여 저희 랩의 독특하고 대표적인 로봇을 개발하는 것이 목표입니다. 다음으로, 개발된 로봇이 실제 생활과 산업현장 등에 활용될 수 있게 하는 것이 목표입니다. 개발되는 기술이 실험실 내에서의 연구만 아니라, 실제 생활에 도움이 되어 잘 활용되기를 바랍니다.
Q. 로봇공학자로서 꼭 도전해 보고 싶은 분야나 로봇 제품이 있다면?
단기적으로는 최근에 많은 연구가 되고 있는 보행 로봇을 잘 만들어 보고 싶고, 장기적으로는 독특하고 창의적인 로봇을 만들고 싶습니다. 그리고, 개발되는 로봇이 실생활에 활용될 수 있는 수준으로 개발하고 싶습니다.
Q. 로봇공학자가 되려는 학생들이 늘어나고 있습니다. 그러기 위해서는 어떤 준비와 노력이 필요한지 후배들에게 조언을 해주신다면?
로봇공학은 수학과 여러 과학적 지식이 융합되어야 하는 분야입니다. 따라서, 수학, 물리, 화학 등의 여러 전공과목에 대한 수업을 들을 때, 그 개념과 응용을 잘 익혀야 할 것이며, 이러한 기본기가 잘 갖추어지면 로봇의 개발에 유용하게 사용이 가능할 것입니다. 또한, 대부분의 관련 기술자료가 영어로 쓰여져 있고, 외국의 여러 학자들과 토론을 해야 하는 경우도 많으므로 영어 실력도 키우는 것이 필요하겠습니다. 그리고 무엇보다 중요한 것은 로봇을 개발하고자 하는 의지와 꿈이 중요하겠습니다. 로봇은 여러 학문적 지식이 필요하므로, 다양한 분야의 지식을 습득해야 하고, 이를 융합하는 과정은 예상외로 많은 노력이 필요합니다. 따라서, 이러한 창조적 과정의 고통을 잘 견딜 수 있기 위해서는 로봇에 대한 강한 열정이 뒷받침되어야 할 것입니다.
 |
||
| ▲VIP 앞에서 Quadnake를 시연하고 있다. (사진 출처:=청와대 게시판) | ||
Q. 국내 로봇산업 발전을 위한 조언을 해 주신다면...
저도 아직 배워야 될 것이 많고, 앞으로 연구개발을 통하여 국내 로봇 산업에 기여해야하기 때문에 현재 조언까지 할 위치는 아닌거 같습니다.
조규남 ceo@irobotnews.com






