- '소프트 로보틱스'에 논문 발표
뱀의 이동 능력은 다른 어떤 동물보다도 탁월하고 창의적이다. 다른 동물이 눈치채지 못할 정도로 조용히, 그리고 매우 빠르게 이동한다. 나무를 타고 오르기도 하고 물을 가로지르기도 한다. 로봇 과학자들은 뱀의 이런 탁월한 이동 능력에 주목해 뱀을 닮은 로봇 개발에 적극 나서고 있다.

'카티아 베르톨디(Katia Bertoldi)' 등 하버드대 로봇 과학자들은 뱀의 탁월한 이동 능력의 비밀이 뱀 피부에 있는 기하학적인 비늘 구조와 패턴에서 유래한다고 보고 뱀의 피부와 비늘을 모사한 인공 피부와 소프트 액추에이터를 개발했다. 이들의 연구 성과는 ‘사이언스 로보틱스(Science Robotics)’ 최신호에 게재됐다. 논문 제목은 ‘Kirigami skins make a simple soft actuator crawl’이다.
연구팀에 따르면 뱀의 비늘은 모두 같은 방향을 향하고 있다. 이 같은 기하학적 및 대칭적인 무늬구조는 지면과의 마찰력을 높여 뱀이 전진하는데 큰 도움을 준다. 전진하면 미끄러지듯이 이동하고 반대 방향을 향하면 지면에 딱 달라 붙는다.
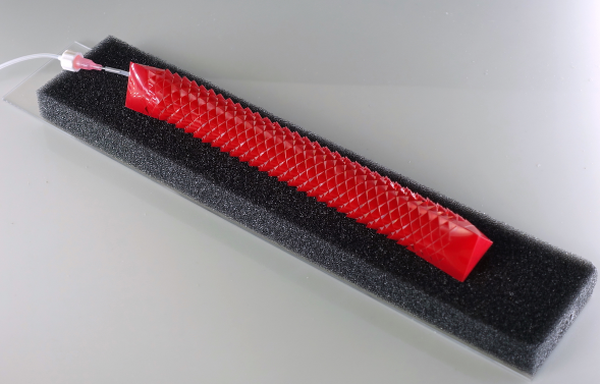

▲ 인공 스킨 로봇이 이동하고 있는 모습
하버드대 연구진은 뱀의 비늘 구조를 모방해 신축적이고 반복적인 운동이 가능한 비늘 구조의 소프트 액추에이터를 개발했다. 비늘의 무늬 패턴은 일본 종이접기(오리카미)의 변종인 ‘키리카미’를 응용해 만들었다. 실리콘 고무 튜브에 레이저로 무늬를 각인했다. 연구팀은 비늘의 모양을 각각 삼각형, 사다리꼴, 원형 등으로 만들어 이동 속도를 테스트했다. 사다리꼴 무늬의 비늘이 이동 효율이 높은 것으로 나타났다. 사다리꼴 모양 무늬를 넣었을 경우 보다 신축적으로 늘어나고 움직임의 폭도 컸다.
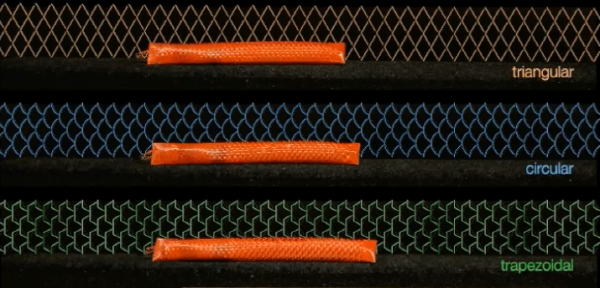
▲ 비늘 모양에 따른 신축성 정도와 이동 효율성 측정
이번에 개발된 기술은 좁은 통로를 이동하는 소프트 로봇, 인체 내부를 움직이는 의료용 로봇 등에 적용 가능하다고 연구팀은 밝혔다.
장길수 ksjang@irobotnews.com






