- 美 카네기 멜론대, 해양 무척추동물로부터 영감받아 개발
 |
||
| ▲ 카네기 멜론대(Carnegie Mellon University) 연구팀이 해양 무척추동물인 거미불가사리(brittle star)로부터 아이디어를 얻은 소프트 로봇을 개발했다.(사진=테크엑스플로어) | ||
카네기 멜론대(Carnegie Mellon University) 연구팀이 형상기억 합금으로 만든 소프트 로봇을 개발했다고 '테크엑스플로어'가 보도했다.
패트릭(PATRICK)'이라 불리는 이 로봇은 해양 무척추동물인 거미불가사리(brittle star)로부터 아이디어를 얻어 개발한 소프트 로봇이다. 수중에서 간단한 임무를 수행하고 거미불가사리의 민첩한 동작에 대해 연구하기 위해 제작됐다. 이번 연구 성과는 출판전 논문 공개 웹사이트인 ‘아카이브(Arxiv.org)’에 게재됐다.
이 소프트 로봇은 형상기억 합금(Shape-Memory Alloy·SMA) 코일로 구동되는 다섯개의 다리로 물속에서 기어다닌다. 이 합금는 힘을 가해서 변형을 시켜도 본래의 형상을 기억하고 있어 조금만 가열해도 곧 본래의 형상으로 복원된다. 이 로봇은 또 다리가 다양한 방식으로 재배열이 가능한 형상기억 합금 '근육'으로 이뤄져 있어 수중에서 다양한 동작을 수행하는 게 가능하다. 이는 몇 가지 간단한 움직임이나 보행 스타일만 가능했던 기존 모바일 소프트 로봇에게선 찾아보기 힘든 특징이다.
 |
||
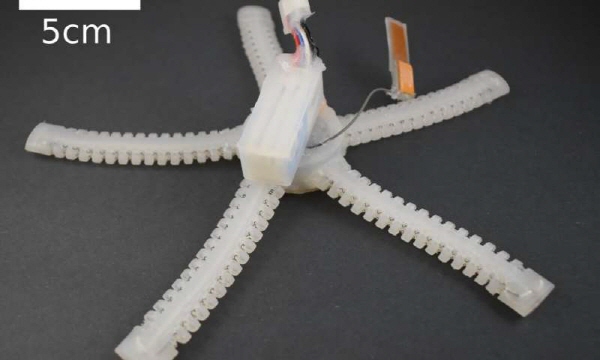
| ▲ 패트릭(PATRICK)은 형상기억 합금(Shape-Memory Alloy) 와이어로 구동되는 다섯개의 다리로 물속을 기어다닌다. (사진=테크엑스플로어) | ||
연구팀은 로봇이 스스로 주변환경을 감지해 이동할 방향을 결정하기를 원했다. 이를 위해 로봇이 물속에 잠긴 상태에서도 물 밖에 있는 장치와 무선으로 통신할 수 있는 프레임워크를 개발했다. 이로써 패트릭은 본체를 구성하는 하드웨어 부품에만 의존하지 않고 환경을 자발적으로 감지하고 계산할 수 있게 됐다.
이번 연구에 참여한 '제크 패터슨(Zach Patterson)'은 "우리는 외부 하드웨어에 묶여있지 않은 소프트 로봇이 주변 환경 및 동작이 매우 불확실한 경우에도 정해진 목표를 향해 실시간으로 이동하는 게 가능하다는 사실을 입증했다"며 "하지만 온도, 재료 변형, 마찰 등에서 생기는 복잡한 상호작용 때문에 이 로봇이 주어진 명령에 구체적으로 어떻게 반응해 움직이는지 확신할 수 없다"고 전했다.
패트릭의 자율 수중기동 능력은 유연하고 복잡한 구조의 직접적인 결과다. 이 로봇은 복잡한 디자인 때문에 동작을 예측하기 어렵지만, 제어 알고리즘 없이도 형태를 변경해 주변 환경에 있는 장애물에 자동적으로 반응한다.
이번에 개발한 로봇은 여러 유용한 분야에 적용이 가능할 전망이다. 예를 들어, 지질탐사를 수행하고 최소 침습적 생태 및 생물학적 샘플링을 얻는 데 사용될 수 있다. 연구팀은 앞으로 로봇이 다양한 작업을 수행할 수 있도록 해당 구조물에 센서를 구현하고, 제어 및 계획 알고리즘을 실험하고, 제어를 위한 머신러닝 접근방식을 개발할 계획이다.
조상협 robot3@irobotnews.com






