- 스위스 연방 산림·눈·경관연구소(WSL), 스파이젠(SPYGEN) 등과 공동 연구
 |
||
| ▲ 스위스 취리히 연방공대와 스위스연방 산림·눈·경관연구소 연구진이 생물이 남긴 표본을 채취하기 위해 나뭇가지에 착륙할 수 있는 특수 드론을 개발했다. | ||
스위스 취리히 연방공대(ETH Zurich)와 스위스연방 산림·눈·경관연구소(WSL) 연구진이 생물이 남긴 표본을 채취하기 위해 나뭇가지에 착륙할 수 있는 특수 드론을 개발했다고 지난 19일(현지 시각) 밝혔다. 이 드론은 생물다양성을 연구하는 과학자들에게 새로운 연구 지평을 열어줄 수 있을 것으로 기대된다.
생태학자들은 살아있는 유기체들이 남긴 유전물질의 흔적인 ‘환경 DNA’(eDNA)를 추적, 분류, 감시하는 방식으로 생물 다양성에 대한 연구를 하고 있다. 과학자들은 환경 DNA 흔적을 바탕으로 어떤 생물종들이 특정 지역에 서식하는지를 결정한다.
과학자들이 물이나 토양에서 생물의 표본을 얻는 것은 쉽지만, 아주 큰 숲에 접근하는 것은 어렵다. 결과적으로 많은 생물 종들이 제대로 탐사되지 않은 지역에서 추적되지 않은 채로 존재하고 있다.
취리히 연방공대, 스위스연방 산림·눈·경관연구소(WSL), 스파이젠(SPYGEN) 등의 과학자로 이뤄진 연구팀은 나뭇가지에서 자율적으로 표본을 채취할 수 있는 특수 드론을 개발했다.
 |
||
| ▲ 나뭇가지에서 표본을 채취하는 모습 | ||
 |
||
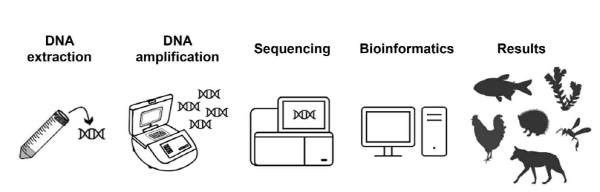
| ▲ 환경DNA 분석 과정 | ||
드론에는 접착제 조각(adhesive strips)이 장착되어 있다. 드론이 나뭇가지에 착륙하면 가지에 붙어있는 물질이 이 접착제 조각에 달라붙는다. 그런 다음 연구원들은 실험실에서 DNA를 추출하고, 분석하며, 데이터베이스와 비교해 다양한 유기체의 유전적 정보와 일치하는지 여부를 확인한다.
나뭇가지들은 굵기와 탄력성이 모두 다르다. 드론이 나뭇가지 위에 착륙할 때 나뭇가지들은 휘어지고 튀어오른다. 연구팀에 따르면 나뭇가지에 자율적으로 접근할 수 있고 표본을 채취할 수 있을 정도로 오랫동안 안정적으로 유지할 수 있는 방식으로 드론을 프로그래밍하는 것은 매우 큰 도전 과제다.
스테파노 민트체프(Stefano Mintchev) 취리히 연방공대 환경로봇학 교수는 "나뭇가지에 착륙하려면 복잡한 제어가 필요하다. 드론은 나뭇가지가 얼마나 유연한지 알지 못하기 때문에 연구팀은 처음에 힘 감지 케이지를 장착했다. 이를 통해 드론은 현장에서 이 요소를 측정하고, 비행 시 통합할 수 있었다“고 말했다.
연구팀은 7종의 나무에서 자신들이 개발한 특수 드론을 테스트했다. 나뭇가지에서 채취한 표본을 분석한 결과 조류, 포유류, 곤충 등 총 21개에 달하는 유기체 또는 분류군의 DNA를 발견했다.
이번 연구 성과는 전문 저널인 '사이언스 로보틱스'에 발표됐다.
연구팀은 이제 드론의 기능을 더욱 개선해 싱가포르에서 열리는 대회에 참여하기를 원하고 있다. 이 대회는 100 헥타르의 열대 우림에서 24시간 안에 가능한 한 많은 다른 종들을 탐지하는 것이 목표다.
열대우림에서 표본을 수집하는 것은 연구팀에 훨씬 도전적인 과제다. 잦은 비는 나뭇가지 표면에서 eDNA를 씻어내고, 바람과 구름은 드론의 안전적인 비행을 방해한다.
스테파노 민트체프 교수는 "우리의 표본 추출 방법이 열대의 극한 조건에서도 입증될 수 있을지 매우 궁금하다"고 말했다.
장길수 ksjang@irobotnews.com






