- 내년 3월까지 켄로보텍과 공동 실증 추진
 |
||
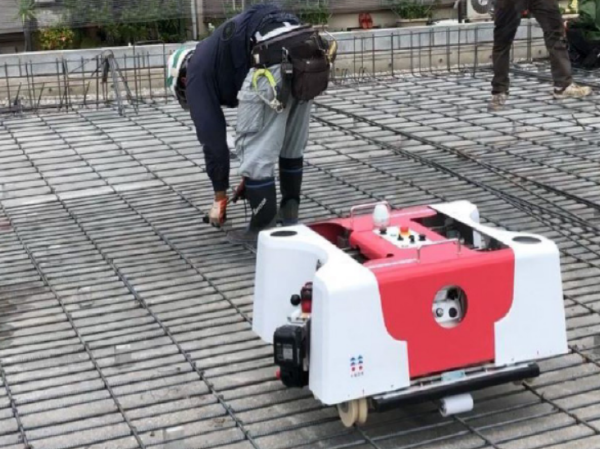
| ▲ 철근 결속로봇이 견설 현장에서 활용되고 있다.(사진=서일본NTT) | ||
일본 통신사업자인 ‘NTT서일본’이 켄로보텍과 공동으로 건설 현장의 노동력 부족 해결을 목표로, 건설로봇의 원격 조작과 운영 지원 환경 구축을 위한 실증 실험을 시작했다고 지난달 29일 발표했다.
일본은 초고령화와 저출산의 영향으로 인력 부족이 심각한 상황이다. 특히 지역 경제를 지탱하고 있는 건설업이나 농림수산업, 간병 및 요양 등의 영역에서 인력이 크게 부족해 로봇의 활용이 기대되고 있다. 일본에선 2030년에 약 130만명의 건설 노동자가 부족할 전망이다.
NTT서일본과 켄로보텍은 현재 건설 현장에 활용되고 있는 철근 결속 로봇 '토모로보'의 원격 조작·운영 지원 환경 구축을 위한 공동 실증 실험을 9월말 개시했다.
 |
||
| ▲ 공동 실증 실험의 개요 | ||
현재 현장 작업원이 수행하고 있는 로봇의 방향 전환이나 레인 체인지 등 로봇 조작 업무를 원격으로 수행함으로써 현장 작업을 줄이고, 건설 업계에 익숙하지 않은 작업자들도 원격지에서 현장 작업을 지원할 수 있는 구조를 만들겠다는 구상이다.
이번 공동 실증 실험을 통해 NTT서일본과 켄로보텍은 철근 결속 로봇 ‘토모로보’의 자율성을 높이기 위한 횡이동(横移動) 기능 및 기구를 개발하고, 로봇 원격 제어 및 조작을 위해 필요한 통신 및 클라우드 로보틱스 기반을 구축할 계획이다. 원격 운영자 조작 UI, 데이터 수집 등 기능도 개발한다. 실증 기간은 2022년 9월 26일부터 2023년 3월 31일까지다.
양사는 향후 이기종 건설 로봇, 복수 건설 로봇의 원격 조작 및 운영 지원에도 나선다는 계획이다.
장길수 ksjang@irobotnews.com






