- 전문 학술지 '매터'에 시제품 발표
 |
||
| ▲ 열을 가하면 소프트 로봇이 튜브 모양을 형성한다. | ||
중국 텐진대 연구진이 열을 가하면 '자가 조립(self-assemble)' 기능을 수행하면서 경사지나 울퉁불퉁한 지형을 이동할 수 있는 4D 프린팅 소프트 로봇을 개발했다고 테크익스플로어가 보도했다.
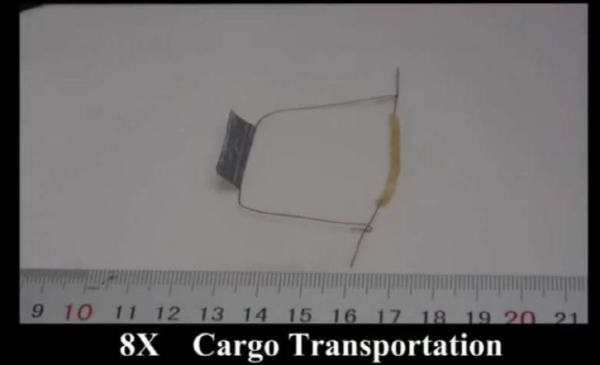
튜브 형태의 이 소프트 로봇 시제품은 20도 경사지를 오르고, 자신 몸무게의 40배가 되는 카트를 끌고 이동하는 게 가능하다. 텐진대 연구진은 연구 성과를 전문 학술지인 ‘매터(Matter)’에 게재했다.
텐진대 재료과학자인 웨이 펑(Wei Feng)은 “이 로봇은 더듬이를 갖고 있는 곤충처럼 작은 장애물을 극복할 수 있으며, 장애물이 너무 높으면 되돌아온다”며 “전체 과정이 인간의 개입이나 제어없이 자발적으로 이뤄진다”고 말했다.
이 소프트 로봇은 평평하고, 직사격형의 얇은 시트인 ‘3D프린팅 액정 탄성중합체(liquid crystal elastomer)’를 기초로 만들어졌다. 일종의 신축성 있는 플라스틱 재료다. 직사각형 시트 아래를 가열하면 소프트 로봇이 비틀어지면서 스프링과 같은 튜브 모양을 형성한다. 외부 자극으로 발생하는 형태의 변화는 프린팅 공정에 '시간'이라는 4차원을 추가하면서 4D 물체를 만들어낸다.
또한 튜브 형태를 형성한 소프트 로봇은 뜨거운 열과 접촉하면 긴장관계가 조성되면서 한쪽 방향으로 굴러가게 된다. 이 동작을 일으키는 힘이 강해 20도 경사지를 오르거나 자신의 무게보다 40배 무거운 하중을 운반할 수 있다. 로봇의 길이는 속도에 영향을 미치는데, 로봇의 길이가 길면 더 빨리 굴러다닌다.
 |
||
| ▲ 경사지를 오르는 소프트 로봇 | ||
 |
||
| ▲ 소프트 로봇이 카트를 끌고 가는 모습. | ||
웨이 펑은 “우리는 4D 프린팅을 통해 액정 탄성중립체를 다양한 형태의 샘플로 가공했으며, 빛ㆍ열ㆍ전기 등으로 샘플을 자극해 그들의 반응을 관찰했다”며 “우리는 형태의 변형 외에도 많은 흥미로운 주행 현상을 발견했다”고 말했다.
연구진은 이 소프트 로봇을 파이프와 같은 매우 좁은 공간이나 표면 온도가 200℃의 극한 조건에 투입해 작업을 수행할 수 있을 것으로 기대하고 있다. 웨이 펑은 "우리는 소프트 로봇이 더 이상 고정된 위치에서 형태를 변경하는 단순한 액추에이터로 제한되기를 원하지 않는다“고 말했다.
장길수 ksjang@irobotnews.com






