- 일본 오사카대 모리시마 게스케 교수팀, 연구 성과 발표
 |
||
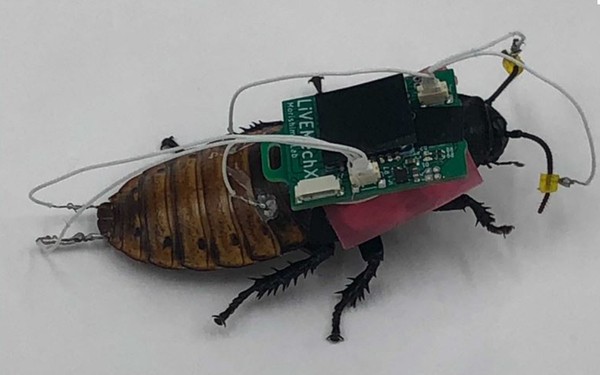
| ▲ 사이보그 바퀴벌레(사진=오사카대학) | ||
일본 오사카대학 모리시마 게스케(森島圭祐) 교수 연구팀이 바퀴벌레를 자율제어해 열원(熱源)으로 유도하는 데 성공했다고 일간공업신문이 보도했다.
연구팀은 바퀴벌레의 등 부분에 부착한 마이크로 컴퓨터를 이용해 회전 및 전진 운동을 수행할 수 있도록 제어했다. 일종의 사이보그 바퀴벌레를 만든 셈이다.
실험에서 바퀴벌레는 뜨거운 물을 부은 컵에 더듬거리면서 도착했다. 곤충의 높은 주행 능력을 이용해 열원을 탐색하는 시스템으로 활용될 수 있을 것으로 기대된다. 재해시 잔해더미 속에 묻혀있는 사람 등 생명체를 탐색하는 기술을 확보하는 데 목표를 두고 있다.
연구팀은 마다가스카르에 서식하는 바퀴벌레의 더듬이(촉각)와 엉덩이에 전극을 꽂아 전기적으로 자극하는 방식으로 바퀴벌레의 이동을 제어했다. 바퀴벌레는 촉각을 자극받으면 자극받은 쪽의 반대 방향으로 회전한다. 또 엉덩이를 자극하면 자극으로부터 도망치는 것처럼 커브를 돌면서 앞으로 전진한다. 이같은 방식으로 자극을 조합하면 바퀴벌레를 목표 지점까지 도달하게 할 수 있다는 설명이다.
연구팀은 바퀴벌레의 등 부분에 부착 가능한 무게 6.3g의 제어모듈을 개발했다. 이 제어모듈은 무선 마이크로 컴퓨터와 전지, 온도기록계를 탑재했다. 열원이 시야에 들어 오면 그쪽 방향으로 방향을 바꿔 전진하도록 프로그래밍되어 있다. 열원을 감지하면 0.1초간 전기자극을 주고 0.4초간 대기하는 것을 반복적으로 수행한다.
연구팀은 바퀴벌레에 센서와 컨트롤러를 연결해 독자적인 탐험 능력을 갖춘 자율형 열원 탐색 시스템을 완성했다. 잔해더미 속에 묻혀있는 사람의 체온을 지표로 탐색 작업을 수행할 수 있도록 했다. 이 사이보그 바퀴벌레는 기계로 움직이는 로봇이 진입할 수 없는 작은 공간에 넣어 탐색 작업을 수행할 수 있다. 연구팀은 향후 방 크기의 공간에서 열탐색 기능에 대한 실증 연구를 진행하고 군집 제어에 관한 연구도 수행한다는 계획이다.
장길수 ksjang@irobotnews.com