'젊은 로봇 공학자(Young Robot Engineer)' 코너는 한국로봇학회와 로봇신문이 공동으로 기획한 시리즈물로 미래 한국 로봇산업을 이끌어 갈 젊은 로봇 공학자를 발굴해 소개하는데 있다.
48번째 인터뷰는 명지대 최동일 교수다. 최 교수는 1984년생으로 충남 당진이 고향이다. 충남과학고등학교를 거쳐 2005년 한국과학기술원(KAIST) 기계공학과를 졸업했다. 동 대학원에 진학해 기계공학으로 석사, 2012년 2월 박사 학위를 받았다. 박사 졸업 후 2012년 8월까지 KAIST, 2012년 9월부터 2013년 12월 31일까지 카네기멜론대학에서 박사후 연구원으로 재직했다. 귀국 후 2014년 1월부터 2016년 1월까지 2년간 한국항공우주연구원 선임연구원, 2016년 1월부터 2018년 8월 31일까지 네이버랩스 책임연구원으로 근무하다 2018년 9월부터 현재 명지대 기계공학과 교수로 근무하고 있다. 올해 1월 로봇 스타트업 ㈜오픈로봇을 설립해 대표도 맡고 있다.
주요 관심 분야는 로봇 동역학 및 제어, 로봇 제어 시스템 개발, 로봇 머니퓰레이터 설계 및 제어, 바퀴형 모바일 로봇 설계 및 제어 등이다. 현재 고속 자율주행 배달로봇 개발, 신개념 감속기 동력전달 구조 해석 및 설계, 오픈소스 모터제어기 개발, 다족형 로봇 동역학 제어 분야를 연구하고 있다. 대한기계학회 IT융합부문 편집이사(2019~), 2019년 9급 공개경쟁채용시험 기계일반 선정위원 (2019), 대한기계학회 동역학 및 제어 / IT융합부문 공동 2020년 춘계학술대회 조직위원 플랫폼 담당 (2020), 국방로봇학회 기획 이사(2021~), 대한기계학회 본부 홍보이사 (2021~) 등을 맡아 대외활동도 활발히 하고 있다.
 |
||
| ▲명지대 최동일 교수 | ||
Q. 최근 하고 계신 연구가 있다면 소개 부탁드립니다.
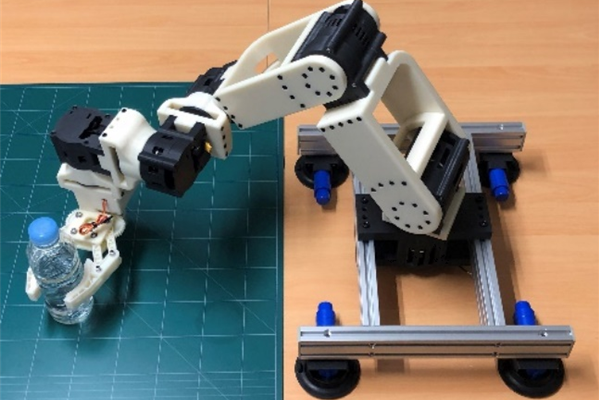
저희 랩 이름은 다이나믹 로봇 제어 연구실 (Dynamic Robot Control Lab.)로 로봇을 개발하고 제어하는 일을 주로 합니다. 최근 활발하게 진행중인 연구로는 3D 프린터로 제작한 로봇 액추에이터 모듈과 이를 활용한 6자유도 로봇팔이 있습니다.
 |
||
| ▲3D 프린터로 제작한 로봇 액추에이터 모듈 | ||
 |
||
| ▲3D 프린터로 제작한 6자유로 로봇팔 | ||
이밖에도 신개념 로봇용 감속기 개발을 진행중에 있습니다. 최근에는 로봇에 사용되는 모터가 지름이 크고 두께가 좁은 토크 모터의 사용이 보다 많아졌고 이에 따라 높은 감속비를 내는 하모닉드라이브 감속기에 비해 보다 낮은 감속비에서 보다 좋은 역구동성을 지닌 감속기의 수요가 늘어나고 있습니다. 저희가 진행하는 신개념 로봇용 감속기 프로젝트는 이러한 측면에서 유성감속기와 정밀나노 가공 공정을 이용한 역구동성이 높은 감속기를 개발하는 것을 목표로 하고 있습니다.
 |
||
| ▲고속 자율주행 배달로봇 | ||
또 다른 연구주제로 “고속 자율주행 배달로봇의 동적균형제어에 관한 연구”로 최근 음식 배달 로봇등이 실용화를 앞두고 있는데 이를 보다 고속으로 가능하게 하는 배달로봇에 대한 연구입니다. 음식, 커피와 같은 유동성이 높은 물체는 이송중에 높은 가속력이 가해질 경우 원치 않는 상황이 벌어질 수 있어 이를 제어를 통해 적절히 조절하여 빠른 가감속으로 움직이는 상황에서 안전성을 유지하는 방법에 대한 연구입니다.
 |
||
| ▲신개념 로봇용 감속기 | ||
기본적으로 로봇이 이동할 경로가 주어지면 MPC(Model Predictive Control)을 이용한 모션 계획법을 통해 로봇의 상부에 놓인 물체에 가해지는 원심력 등을 상쇄시킬 수 있는 상부 트레이의 기울기를 계산하여 이를 통해 물체를 안정화 시킵니다. 저의 박사연구의 연장선상에 있는 주제로 현재는 가제보(Gazebo) 시뮬레이터를 이용하여 로봇이 빠른 가속력으로 움직이더라도 물체를 안정적으로 이송시킬 수 있는 기술에 대한 검증을 마친 상태이며 올해 하반기에 하드웨어 개발을 완료할 계획입니다.
Q. 한국과학기술원(KAIST)에서 “고속 이동 매니퓰레이터의 개발 및 모델 기반의 안정화 방법에 관한 연구”로 박사 학위를 받으셨는데 어떤 내용인지 소개 부탁 드립니다.
제가 졸업한 연구실은 KAIST 휴보랩으로 제가 석사학생으로 들어갔을 당시에는 휴보 KHR-3가 만들어진 이후라 휴보 개발에 직접적으로 참여하기 보다는 또 다른 형태의 로봇에 관심이 갔는데 오래전부터 관심이 많았던 바퀴형 로봇을 연구하게 되었습니다. 그중에서도 다이나믹한 고속 주행이 가능한 역진자형의 바퀴형 로봇에 대해 연구하게 되었습니다. 역진자형의 바퀴형 로봇은 무게중심이 높아 큰 가속력을 내기 쉽지 않은데 동역학 모델에 기반한 무게중심 위치의 동적 매니퓰레이터를 이용하여 빠른 가속력과 감속력 그리고 선회력을 가질 수 있었습니다. 이렇게 개발된 로봇이 HuboQ로 초기에는 커피, 음식 배달로봇으로 사용하고자 했었습니다. 하지만, 그 당시만 해도 로봇의 자율주행 기술이 크게 발전하지 못해 사람이 수동으로 조작해야만 했는데, 이제는 음식 배달로봇이 실용화를 앞두고 있어 감회가 새롭습니다.
 |
||
| ▲HuboQ 4륜 고속주행모드 (좌), HuboQ 2륜 자기균형모드 (중), HuboQ 2륜 인간탑승 자기균형모드 | ||
Q. 로봇 동역학 및 제어, 로봇 제어 시스템 개발 분야에 관심이 많은 것으로 알고 있습니다. 로봇 동역학이나 제어에 대한 최신 동향이나 특이점이 있다면 무엇이 있을까요?
최근 몇 년간은 4족형 로봇의 기술개발이 빠르게 진전되었다고 생각합니다. 보스톤 다이나믹스의 스팟(Spot)이나 MIT 치타(Cheetah)와 같이 미국을 중심으로 시작된 4족형 로봇 개발이 성공적으로 이루어졌고, 이후 이 기술이 중국에서 다시 한번 성공적으로 재현되면서 오히려 4족보행 로봇은 중국 주도로 바뀌고 있다는 생각이 들 정도로 중국의 기술력이 급성장하였습니다. 중국은 드론이 세계적으로 로봇분야에 급부상된 이후로부터 DJI와 같은 기업이 세계적으로 인정을 받기 시작하였고 이후 2족형, 4족형 로봇에 이르기까지 세계 정상급의 로봇기술을 보유하게 되어 한국인으로써 더욱 분발해야 하겠다는 생각을 하게 되었습니다.
로봇 동역학 제어분야에 있어서는 과거 동역학 방정식을 구하고 모델을 이용해서 제어하던 고전적인 방법에서 심층학습이나 강화학습 등의 최신 기술이 각광을 받고 실제로 높은 성능을 보여주면서 로봇을 제어함에 있어서 고전적인 방식과 최신의 방식이 공존하고 있는 상태입니다. 두 방법 다 장단점이 있겠지만 저는 주로 고전적인 방법을 다뤘기 때문에 기존에 사용하던 방식의 고도화와 최신 기술에 대한 수용의 기로에서 제 자신은 어느쪽에 더 무게를 둘지 항상 고민이 되는 부분이기도 합니다.
Q. 로봇 제어 연구에서 가장 큰 애로 기술은 무엇인지 궁금합니다.
로봇을 제어함에 있어 가장 큰 걸림돌은 예전이나 지금이나 액추에이터 기술이라고 생각합니다. 물론 최근 많은 발전이 있어 다이나믹한 성능을 갖춘 다양한 로봇이 성공적으로 개발되고 있긴 합니다. 하지만, 이는 과거에 비해 발전이 있었지만, 앞으로 더 큰 발전을 이륙해야 하는 분야라고 생각합니다. 흔히, 액추에이터가 충분한 힘과 충분한 속도를 어느 때나 낼 수 있다면 로봇의 제어는 굉장히 쉬워진다라고 합니다. 이는 로봇 액추에이터의 출력과 응답성 등이 로봇 제어를 함에 있어 큰 걸림돌이 되고 있다고 이해할 수도 있습니다. 과거 고감속 관절 위치제어가 로봇 액추에이션 기술에서 주로 사용되었다면 최근에는 저감속 관절 토크제어가 각광을 받고 있고 이러한 변화가 최근의 족형로봇의 발전을 이끈 큰 원동력이라고 생각됩니다.
Q. 로봇을 연구하시게 된 동기가 있다면?
초등학교 저학년 시절 저에게 하루 100원의 용돈이 주어졌는데 그당시 문방구에 가면 100원짜리 조립로봇이 있었습니다. 하루에 하나씩 로봇을 조립하는게 굉장히 즐거웠고 또 나중에 그 로봇들이 합체도 되기도 하고 그런 놀이를 즐기는 것이 저에게 큰 기쁨이었습니다. 그렇게 로봇을 좋아하다보니 여기까지 오게 된 거 같습니다. 한때 난 커서 뭐가 될야 할 까 고민한적이 있었는데, 그때 제 마음속에 가졌던 생각은 “뭐든지 생각만 하면 만들 수 있는 사람이 되자” 였었습니다. 아이언맨 영화에 나오는 토니 스타크 같은 사람인데, 아직은 그 경지에 오르지는 못했지만 교수로써 계속 기술을 연마해 나아가다보면 어느 순간 가능할 수도 있지 않을까 하는 꿈을 꿔봅니다.
Q. 2014년부터 2년간 한국항공우주연구원, 2016년부터 2년 반 네이버랩스에 선임, 책임 연구원으로 계셨는데 어떤 연구를 주로 하셨는지요?
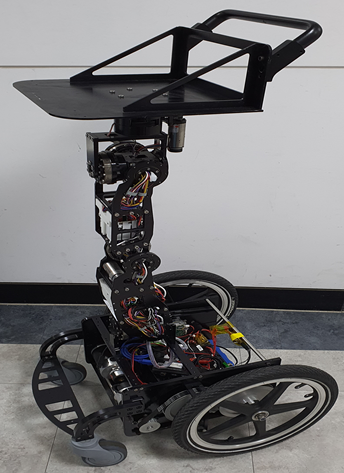
한국항공우주연구원에서는 발사체 연구를 하였고 그중에서도 발사체 제어팀에 있었습니다. 제가 담당했던 업무는 발사체의 두뇌에 해당하는 관성항법유도장치 개발이었습니다. 흔히 로봇에 IMU라고 기울기를 측정할 수 있는 센서가 있는데, 발사체에 들어가는 IMU를 개발하는 팀에서 일했다고 생각하면 되겠습니다. 발사체에 들어가는 IMU는 일반 로봇에 들어가는 IMU에 비해 훨씬 고가로 높은 정확도와 신뢰도를 요구합니다. 이를 위한 다양한 실험과 테스트를 수행했었고 발사체 발사까지 함께 하지는 못했지만 저에게 큰 도움이 되는 유익한 경험이었습니다. 네이버랩스에서는 네이버에서 로봇팀이 구성된다고 할 때, 박사로는 3번째로 영입되어 로봇팀의 굉장히 초창기 때부터 연구를 함께 수행하였습니다. 초기에는 네이버의 기업철학과 잘 어울어질 수 있는 로봇에 대한 고민을 많았고 이후에는 제가 좋아하던 바퀴형 로봇, 즉 모빌리티 분야에 사용될 수 있는 로봇을 개발하였습니다. 그렇게 해서 개발된 로봇이 개인형 라스트마일 모빌리티(Personal Last-mile Mobility) 일명 SMG(Sports Mobility Gear)라고 하는 로봇입니다. SMG는 전동스케이트보드로 사람이 탑승하여 몸의 기울기를 이용해 스케이트를 제어하는 새로운 방식의 모빌리티로 네이버에서 매년 10월에 개최되는 사내기술 컨퍼런스인 '데뷰(DEVIEW) 2017'에서 선보인 바 있습니다.
 |
||
| ▲Personal Last-mile Mobility 일명 SMG (Sports Mobility Gear) 로봇 | ||
Q. 로봇 스타트업을 직접 창업하셨는데 ㈜오픈로봇은 무슨 회사인가요?
㈜오픈로봇은 제가 올해 초 설립한 로봇 스타트업입니다. 작년에 배우 수지님이 등장한 ‘스타트업’이라는 드라마가 있었습니다. 스타트업에 대해 생각만 가지고 있던 것을 이 드라마를 계기로 실행에 옮기게 되었습니다. 일단, 법인부터 만들고 보자는 생각으로 시작 하였는데 서류작업을 직접 하다보니 시행착오가 많았고 우여곡절 끝에 ㈜오픈로봇을 설립할 수 있었습니다. 1인 기업으로 현재는 큰 매출이 없지만 앞으로 개발할 로봇중에 사업화를 염두에 두고 있는 제품이 있어 이를 위해 노력중에 있습니다. 현재는 로봇용 다기능 모터제어기를 판매중이고 네이버 스마트스토어(https://smartstore.naver.com/ctvt)에서 구매하실 수 있습니다.
Q. 창업을 하시기가 쉽지 않은데 창업을 하시게 된 배경과 창업시 가장 어려운점은 무엇이었나요?
창업을 하는 과정에서 서류작업을 하는 것이 가장 어려웠습니다. 사실 어렵다기 보다는 귀찮았다라는 표현이 더 맞을 것 같습니다. 어떠한 서류를 통과시키려면 여러가지 서류가 필요하고 열심히 준비해 시도하면 어떤 서류가 부족해 다시 해야하는 등의 시행착오가 여러번 반복되어서 이런 부분이 어려웠습니다. 사실 전문가를 써서 쉽게 할 수도 있었지만 직접 회사를 설립해보고 싶은 생각에 이렇게 진행했는데, 다른 분들께는 추천드리고 싶지 않습니다. 주변에 물어볼 사람이 별로 없어 혼자 맨땅에 헤딩하듯 진행했는데 앞으로 이런 부분에 대한 정부차원의 지원이 있었으면 하는 바람입니다.
Q. 로봇 연구자로서 앞으로의 꿈과 목표가 있다면?
제가 만든 로봇을 여러사람이 사용하고 그로인해 보람을 느낄 수 있다면 좋을 것 같습니다. 과거 휴보랩에 있을 때, 가수 김장훈 씨 콘서트에 휴보를 출연시킨 것을 계기로 인연을 맺어 2008년에는 콘서트용 무게를 개발한 적이 있었습니다. 그 밖에도 김장훈-싸이 조인트 콘서트에 사용된 크레인도 개발하였는데 많은 관중이 환호해주고 즐기는 모습에 보람을 느꼈습니다. 앞으로 저희 연구실에서 개발된 로봇이 많은 사람들의 생활속에 사용되어 크고 작게 도움을 줄 수 있는 날이 왔으면 합니다.
 |
||
| ▲사진 왼쪽은 Flying Stage, 김장훈 콘서트 중앙 메인 무대, KAIST, 2008. 오른쪽은 Dual Crane, 김장훈&싸이 콘서트, KAIST, 2009 | ||
Q. 최근 로봇에 대한 관심이 늘어나면서 이를 연구하려는 학생이 늘고 있습니다. 선배로서 후배에게 어떤 준비와 노력이 필요한지 조언해 주신다면?
학생들에게 요즘 저는 파이썬(Python)을 배우라고 강조하고 있습니다. 제가 학교다닐 때만해도 매트랩(Matlab)이 대세 언어이자 프로그래밍 툴이었기 때문에 많은 작업을 매트랩으로 수행했는데, 최근 파이썬을 사용해보니 매트랩에 있는 많은 기능이 파이썬에서도 가능할 뿐만 아니라 많은 사용자 층이 확보되어 코드를 따라 배우기도 매우 좋은 환경이 조성되었습니다. 뿐만 아니라 파이썬은 무료이며 앞으로도 더욱 발전가능성이 높기 때문에 파이썬을 자유자제로 다룰 수 있는 능력을 기르라고 주문하고 싶습니다.
Q. 연구자로서 국내 로봇산업이 한 단계 더 발전하기 위해 조언을 해 주신다면...
그동안 한국 로봇산업은 로봇분야에 대한 꾸준한 지원으로 많은 발전을 이룩해왔습니다. 국가로부터의 꾸준한 인적 지원과 물질적 지원으로 인해 많은 학생들이 배출되었고 학생은 또 다시 실력있는 연구자로 성장하여 산학연에서 우리나라 로봇 R&D를 책임지는 막중한 사명을 감당해내기에 충분한 역량을 이미 갖추었다고 생각합니다. 이러한 선순환의 고리가 계속적으로 이루어지려면 제가 생각하는 가장 중요한 요소는 연구자층이 두꺼워야 한다는 것입니다. 현재 우리나라 R&D는 로봇분야를 막론하고 고학력, 고스펙 우선주의가 팽배해져 있다고 생각됩니다. 물론, 고학력, 고스펙의 연구인력이 아무래도 실력도 좋고 더 나은 연구결과를 내놓을 것이라는 예상은 틀린 것은 아닙니다. 하지만, 연구를 하다보면 이론적인 부분에서 높은 지식을 쌓은 박사인력도 필요하지만 함께 일을 보조하여 수행해나갈 석사 인력, 그리고 학사 인력 그리고 고졸 인력까지 두루두루 필요하고 이러한 연구인력 층이 두꺼워야만 앞에서 이야기한 연구 인력의 선순환 고리가 계속적으로 유지될 수 있다고 생각합니다. 이러한 두꺼운 인력층이 각자 맡은 부분에서 높은 실력을 축적할 때 더욱 큰 시너지 효과를 낼 수 있고 서로가 서로를 신뢰하면서 함께 일 할 수 있을 것이라고 생각합니다.
Q. 연구에 주로 영향을 받은 교수님이나 연구자가 계시다면...
아무래도, 저의 지도 교수님이셨던 KAIST 오준호 교수님의 영향을 많이 받았습니다. 작년에 KAIST 교수직에서는 은퇴하셨지만 현재 ㈜레인보우로보틱스를 경영하시고 계십니다. ㈜레인보우로보틱스는 오준호 교수님의 KAIST 연구실인 휴보랩에서 스핀오프(Spin-off)되어 나온 기업으로 현재는 국내 코스닥 상장사로 성장하였습니다. 오준호 교수님은 휴보의 아버지로 유명하시고 로봇계에서는 이분을 모르는 분은 아마 없으실 것입니다. 오 교수님이 이루신 많은 업적이 있으시지만 저는 무엇보다 연구에 대한 지치지 않는 열정을 존경합니다.
조규남 전문기자 ceo@irobotnews.com






