- 'ICRA 2020'에 연구 논문 발표
 |
||
영국 임페리얼 칼리지 런던(Imperial College LondonㆍICL) 연구팀이 형태를 유연하게 바꿀 수 있는 로봇팔을 개발했다고 IEEE 스펙트럼이 보도했다.
임페리얼 칼리지 런던 ‘레즈랩(REDS Lab) 소속 니콜라스 로하스(Nicolas Rojas) 교수 연구팀은 쉽게 구부릴 수 있는 소재를 활용해 소프트 로봇과 강성 로봇(rigid robot)의 성격을 같이 갖고 있는 로봇 팔을 개발하고 2020 국제 로봇 및 자동화컨퍼런스(ICRA:International Conference on Robotics and Automation 2020)‘에 연구 논문을 발표했다.
기존의 대부분 로봇팔은 긴 튜브와 관절로 구성되어 있다. 로봇팔에 보다 자유로운 움직임을 제공하기 위해선 튜브와 관절의 숫자를 늘리는 방식으로 자유도를 높여야 한다. 하지만 튜브와 관절의 숫자를 늘리면 로봇팔의 복잡도, 무게, 가격이 상승한다.
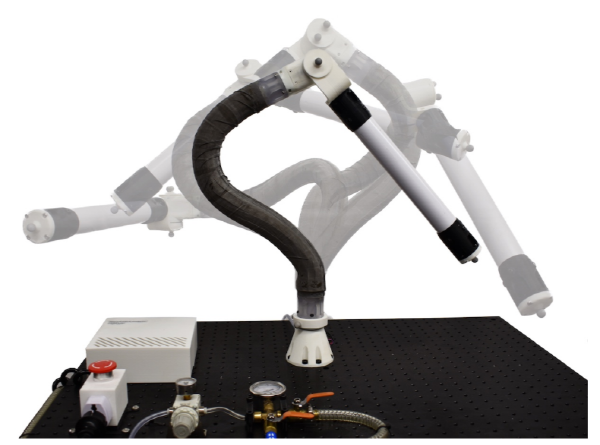
ICL 연구진은 자유도를 추가하지 않고도 보다 자유로운 동작이 가능한 로봇을 제작하기 위해 구브러지기 쉬운 소재를 활용했다. 고정된 튜브와 관절이 아니라 쉽게 형상을 바꿀 수 있는 로봇 소재를 만들었다.
 |
||
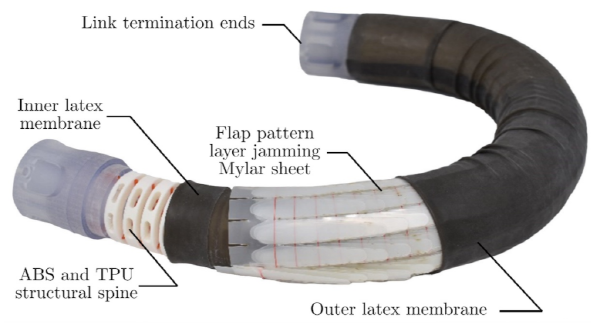
| ▲ 로봇팔의 내부 구조 | ||
연구팀이 개발한 로봇팔의 내부는 폴리에스테르 필름인 마일라 시트(mylar sheets)의 층으로 구성되어 있다. 마일라시트를 겹겹이 쌓은후 덮개(flap) 형태로 자르고, 각각의 덮개 부분이 최소한 11개의 다른 덮개들과 중첩되도록 했다. 마일라는 미끄러운 성질을 갖고 있기 때문에 로봇팔 안에 있는 많은 덮개들은 부드럽게 움직일수 있다. 덮개들은 라텍스 멤브레인으로 봉합되어 있다. 여기에 공기를 불어 넣으면 로봇팔이 딱딱해지면서 원하는 형태를 만들수 있다. 용도에 따라 다른 형태를 제작해 사용할 수 있다는 설명이다.
ICL 연구팀에 따르면 이번에 개발된 로봇팔은 소프트 로봇과 강성 로봇의 성질을 함께 갖고 있으며 액추에이터의 숫자를 늘리지 않고도 기계적으로 복잡한 구조를 만들 수 있다. 사용자들은 자신의 용도에 맞게 로봇팔을 만들어 사용할 수 있다.
장길수 ksjang@irobotnews.com






