- 'IEEE 로보틱스 앤 오토메이션 레터스’에 에 성과 발표
 |
||
MIT 인공지능·컴퓨터과학연구소(CSAIL) 연구진이 소프트 로봇에 활용할 수 있는 감각 기능을 갖춘 로봇 피부(소프트 센서)를 개발했다고 ‘MIT 뉴스’가 보도했다.
이 로봇 피부를 소프트 로봇에 활용하면 소프트 로봇이 자신의 동작과 위치를 3D 환경에서 인식할 수 있다는 설명이다. 사람이 눈을 감으면 주변을 볼 수 없지만 피부 접촉을 통해 주변 사물과 환경을 인식하는 것과 유사한 원리다.
소프트 로봇은 일반적인 강성 로봇(rigid robot)과 달리 수많은 형태로 변화될 수 있지만 제어하는게 힘들다는 단점을 갖고 있다. 또 유연한 성질을 갖고 있지만 다른 연구기관 또는 연구자들이 제조 방법을 따라하는 게 쉽지 않다. 강성 로봇은 자신의 동작과 위치를 확인하기 위해 카메라 등 비전시스템을 이용한 모션 캡쳐 방식을 채택한다. 이에 비해 이번에 개발한 소프트 센서는 비전 시스템 없이 소프트 로봇의 동작과 위치를 인식할수 있도록 도와준다.
MIT CSAIL 연구진은 이번에 코끼리 코처럼 부드럽게, 그리고 신축성이 높은 소프트 로봇의 개발을 시도했다. 이를 위해 소프트 로봇의 동작과 위치를 인식할 수 있도록 감각 기능을 갖춘 피부(소프트 센서)를 만들어 소프트 로봇에 적용했다. 이 로봇은 비전시스템을 활용하지는 않는다.
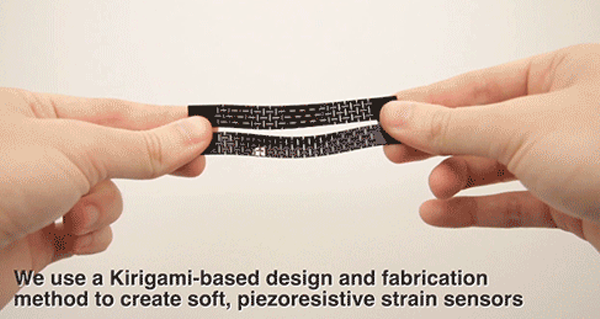
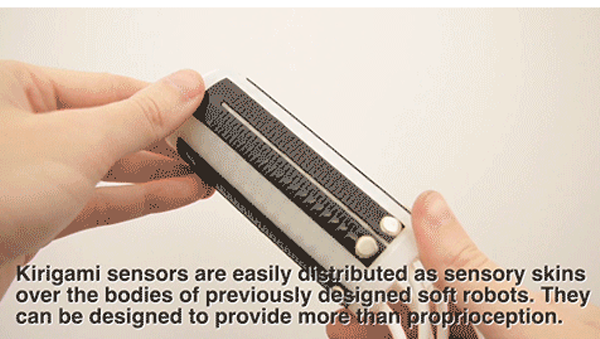
감각 기능을 갖춘 피부를 채택한 소프트 로봇은 ‘자기 수용감각(proprioception)’을 갖게 돼 자신의 동작과 위치를 파악할 수 있다. 감각 기능을 갖춘 소프트 센서를 개발하기 위해 연구팀은 전자폐 차폐 장치에 활용되는 ‘도전 재료(conductive materials)’에 주목했다. 도전 재료는 시중에서 비교적 쉽게 구할 수 있다. 도전 재료는 ‘압전 저항(piezoresistive)’ 특성을 지니고 있다. 압전저항이란 압력을 주면 전기저항이 바뀌는 것을 말한다. 소프트 로봇의 신축성 정도에 따라 소프트 센서가 반응한다. 이때 발생하는 전기저항이 특정한 출력전압으로 바뀌고 이 전압이 특정 동작과 관련된 신호로 인식된다.
 |
||
| ▲ 키리가미 구조의 소프프 센서 | ||
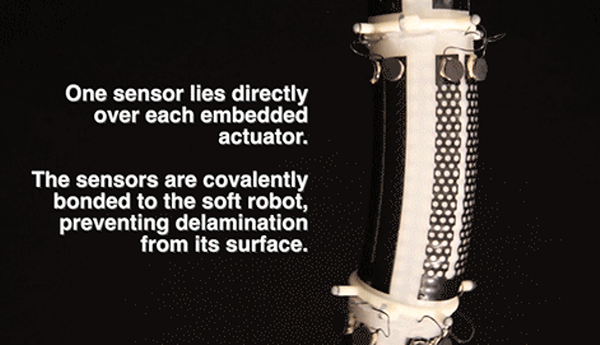
연구팀은 소프트 센서의 신축성과 유연성을 높이기 위해 ‘키리가미(kirigami)’ 설계에서 아이디어를 얻어 도전 실리콘 시트(conductive silicone sheet)에 레이저 기술을 이용해 선, 구멍 등으로 이뤄진 특별한 패턴을 넣었다. 연구팀이 제작한 소프트 로봇은 3개의 부문으로 구성되어 있는데, 각각의 부문은 4개의 유전 액추에이터(총 12개의 액추에이터)로 이뤄져 있다. 또 각각의 센서들은 ‘플라스마 본딩(plasma bonding)’이라는 기법을 통해 결합되어 있다.
 |
||
 |
||
| ▲ 소프트 센서를 부착한 소프트 로봇이 동작하는 모습 | ||
연구팀은 소프트 로봇의 형태를 추정하기 위해 심층신경망 기술을 활용해 훈련을 시켰다. 전통적인 모션 캡처 시스템에서 획득한 데이터와 소프트 센서의 데이터를 비교하는 방식으로 딥러닝 연구를 진행해 적용했다. 이번 연구는 전문 저널인 ‘IEEE 로보틱스 앤 오토메이션 레터스’에 게재했다.
장길수 ksjang@irobotnews.com






