- UX-1 로보틱 익스플로러, 폐광에 투입
 |
||
영화 ‘프로메테우스(Prometheus)’의 팬이라면 외계인 구조물로 보내진, 자발적으로 비행하며 내부 3D 지도를 만드는 탐사선을 떠올릴 것이다.
'뉴아틀라스'에 따르면 폐광의 침수된 터널을 3D매핑해 매장된 광물을 탐색하는 로봇 프로젝트가 진행되고 있다. EU가 공동으로 추진하고 있는 'UNEXMI' 프로젝트다.
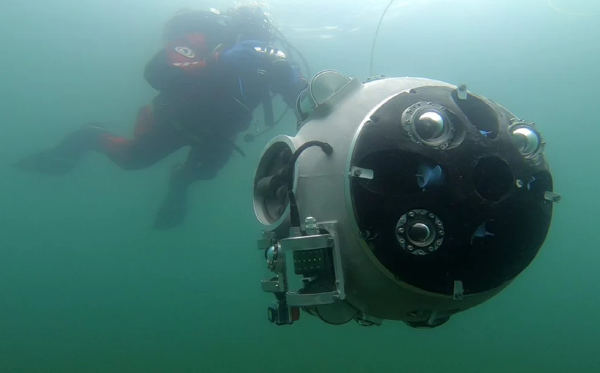
UNEXMI 프로젝트로 개발된 구형(sphere)의 UX-1 로보틱 익스플로러(Robotic Explorer)에는 디지털 카메라 5대와 회전 레이저 라인 프로젝터가 장착돼 유럽 광산 터널의 3차원 지도를 자동으로 헤엄쳐 생성할 수 있다.한번 충전으로 최대 5시간의 런타임에 적합한 리튬 배터리로 구동되는 오목한 추진기가 있다.
사실 많은 광산들이 폐기된 것은 광물이 부족해서가 아니라 극복하기 힘든 기술적 혹은 경제적인 어려움 때문이다. 이를 염두에 두고 로봇에는 다중 스펙트럼 카메라와 감마선 검출기, 물 샘플링 시스템이 갖춰져 있으며 이들 모두 광물 매장지를 탐색하는 데 사용된다. 만약 상당한 매장량이 발견된다면 그 광산은 아마도 개발되고 다시 열릴 것이다.
일부 광산은 100년 가까이 버려져 지하수가 자연적으로 스며들어 채워졌기 때문에 이전에 터널로 만들어졌던 지도는 더 이상 정확하지 않을 수 있다. 예전 맵은 동굴 내부와 같은 특징을 나타내지 않는다. 이같은 상황에서 잠수부들을 터널 내부에 투입하는 것이 매우 위험한데 반해 물을 퍼내고 광물을 찾는 것은 그리 효과적이지 않다.
UX-1은 핀란드, 슬로베니아, 포르투갈, 영국에 위치한 광산들에서 이미 시험되었다. 그렇기는 하지만 유럽 전역에 걸쳐 약 3만 개의 폐쇄된 광산을 탐사하기 전에 해결해야 할 과제가 있다.
스페인의 자동화 및 로봇공학 센터 클라우디오 로시(Claudio Rossi) 교수는 "기술적인 관점에서 볼 때 이 프로젝트는 세 가지 주요 과제에 직면해 있다”며 “첫 번째 도전은 실제 수중 환경(500m)에서 작업할 수 있는 로봇을 만드는 것, 두번째는 외부와의 통신이 없기 때문에 알려지지 않은 환경에서 자율 항해를 달성하는 것, 그리고 마지막으로 지구물리학적 정보를 평가하기 위한 임시 과학 계측을 개발하는 것”이라고 말했다.
침수된 영국 광산 내에서 원격 제어되는 로봇의 현장 테스트는 아래 영상에서 볼 수 있다.
김지영 robot3@irobotnews.com






