‘로보소프트 2019’ 부대 행사로 18일 오후 코엑스에서 열린 ‘로보소프트 2019 컴피티션’에서 서울대 로코-시트(Loco-sheet)팀, 영국 캠브리지대 스틱키 그리퍼(StickyGripper)팀, 서울대 리로(LIRO)팀이 각각 장애물 지형통과 챌린지, 매니퓰레이션 챌린지, 웨어러블 챌린지 우승을 차지했다.
▲ 서울대 로코-시트(Loco-sheet)팀
▲ 영국 캠브리지대 스틱키 그리퍼(StickyGripper)팀
▲ 서울대 리로(LIRO)팀
올해 대회에는 한국(서울대, KAIST, 성균관대)과 미국(터프츠대), 영국(케임브리지대, 브리스톨대), 이탈리아(이탈리아 과학기술원 IIT) 등 소프트 로봇을 주도하는 4개국 7개 기관에서 총 16팀이 출전해 치열한 경쟁을 펼쳤다.
이번 대회는 소프트 로봇의 장애물 지형 통과 챌린지(Terrestrial Race Challenge), 매니퓰레이션 챌린지 (Manipulation Challenge), 웨어러블 챌린지(Wearable Challenge) 등 세 가지 과제를 걸고 경쟁을 벌였다. 각 팀들은 독특한 형태의 소프트 로봇과 그리퍼를 들고 나와 장애물 지형 통과, 다양한 물체(생고기,포도,파인애플,포도송이 등) 조작 및 이동 등을 시연하면서 치열한 경쟁을 펼쳤다.
참가팀들은 충격 또는 부상으로부터의 회복력, 몸체의 외부 환경에 대한 적응 및 변형 능력, 사물과의 섬세한 접촉 능력 등 기존의 전통적인 로봇과는 다른 소프트 로봇만의 고유한 특징과 장점들을 시연했다. 웨어러블 미션에는 특별히 일반 관객들이 직접 심사 과정에 참여해 로봇의 기능성과 창의성, 실용성 등을 평가하기도 했다.
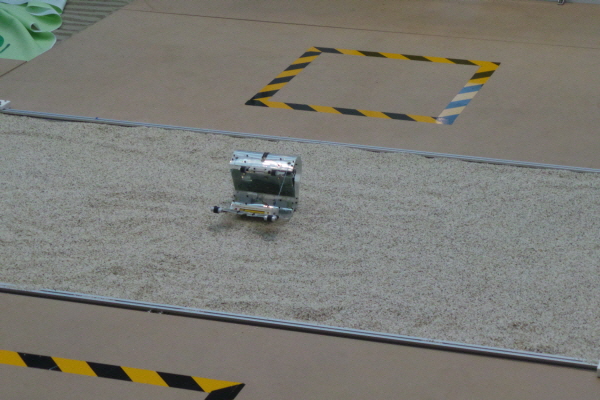
이번 대회는 소프트 로봇의 다양한 가능성을 보여줬다는 점에서 의미를 부여할 수 있다. 각 챌린지에서 소프트 로봇들은 기존의 강성(Rigid) 로봇들이 하기 힘든 유연성과 신축성을 보여주면서 난관들을 하나하나씩 돌파해나갔다. 장애물 통과 챌린지에선 다양한 형태의 소프트 로봇들이 등장해 모래 바닥을 통과하고 비좁은 통로에선 몸집을 줄여 빠져나가는 모습을 연출했다. 매니퓰레이션 챌린지에선 부드러운 그리퍼를 이용해 생고기, 나사, 파인애플, 포도송이 등을 집어 옮기는 등 종전의 그리퍼로는 하기 힘든 과제들을 수행해 소프트 로봇의 피킹 능력을 유감없이 보여줬다. 웨어러블 챌린지에선 팔목에 착용하는 소프트 로봇, 환자들의 신체 및 운동 데이터를 바로 수집할 수 있는 기술들이 선보였다.
한편 이번 대회 2,3위팀 수상자는 다음과 같다.
-장애물 통과 챌린지(2위:캠브리지대 소프트호버<SoftHover>, 3위:서울대 SRBL)