- ⑪생체 모방 로봇의 진화
⑪생체 모방 로봇의 진화
로봇 과학자들은 자연계에 살아 있는 동식물들의 특이한 형태나 운동 메카니즘을 로봇 공학에 적용하려는 연구를 활발하게 진행하고 있다. 생체 모방의 방식은 다양하다. 박쥐, 가오리, 문어 등의 생김새를 그대로 모방한 것에서부터 동물의 발바닥이나 피부 조직을 모방하는 것에 이르기까지 모방의 폭이 넓다. 아예 살아 있는 동물의 조직에 기계적인 메카니즘을 연동시켜 일종의 사이보그 동물을 만드는 시도도 이뤄지고 있다.
독일 자동화 전문업체인 훼스토는 생체 모방 로봇 분야에서 주목받는 성과를 내놓고 있다. 훼스토는 지난 몇 년간 로봇 캥거루, 로봇 거미등 다양한 형태의 생체 모방 로봇을 유튜브를 통해 속속 공개하면서 주목받고 있다.
얼마전에는 여우 박쥐를 닮은 비행 로봇인 ‘바이오닉 플라잉 폭스(Bionic Flying Fox)’를 발표했다. 여우박쥐는 지구상에서 가장 큰 박쥐로, 날개가 아니라 멤브레인으로 이뤄진 날개를 갖추고 있다. 훼스토는 여우박쥐의 구조적 특징을 모방해 비행 로봇을 개발했다.

▲ 훼스토의 여우박쥐 모사 로봇
이 로봇은 날개 길이 228cm, 몸 길이 87cm로 무게 580g의 초경박 로봇이다. 카메라 기반의 위치 확인 기술을 채택했으며 지상국 설비 장비와의 커뮤니케이션을 통해 자율 비행한다. 머신러닝 기술을 채택, 비행 행동을 최적화할 수 있다. 훼스토는 다수의 생체모방 로봇을 유튜브라는 제한된 채널을 통해서만 공개하고 있어 실제 로봇의 존재를 확인하고 싶은 이들에게는 아쉬움을 주고 있다.
로봇 과학자들은 자연계에 존재하는 동물 가운데 특히 곤충에 주목하고 있다. 대표적인 곤충이 벌이다. 하버드대는 10여년 이상 로봇 벌(RobotBee) 개발 프로젝트를 진행해왔다. 하버드대 비스연구소가 개발한 초소형 로봇벌은 하늘을 비상할뿐 아니라 물속에서 헤엄칠 수도 있다. 독일 베를린 자유대학(Free University of Berlin) 소속 과학자들은 먹이를 찾는 꿀벌이 서로에게 정보를 전달하기 위해 추는 8자 춤을 모방해 가장 좋은 먹이 위치를 알려주는 로봇 벌을 개발하기도 했다.

▲ 하버드대 로봇 벌
실제 과학자들은 군집 로봇벌을 개발해 수분 활동을 할 수 있도록 한다는 계획이다. 미국 미네소타대학 ‘샤쉬 샤카르(Shashi Shekhar)’ 교수는 올해 미국 텍사스 오스틴에서 열린 미국과학진흥회(AAAS:American Association for the Advancement of Science) 연례회의에서 실제 수분 활동을 하는 로봇 벌 개발 프로젝트가 미국에서 승인을 받을 것으로 기대하고 있다고 말했다. 그는 군집 로봇 벌들이 파국적인 식량 부족 상태를 막을 수 있는 대안이 될 것이라는 견해를 갖고 있다.
바퀴벌레도 로봇과학자들의 중요한 호기심 대상이다. 미국 UC버클리 ‘폴리패달랩(PolyPEDAL Lab)’ 소속 로봇 과학자들은 건물의 틈새나 작은 구멍을 빠른 속도로 이동하는 바퀴벌레 모사 로봇 ‘CRAM(Compressible robot with articulated mechanism)’을 개발했다. 비좁은 공간에선 몸집을 줄여 이동하는 게 가능하다. 러시아 칼린그라드에 위치한 '임마뉴엘 칸트 발트연방대' 과학자들도 바퀴벌레 로봇을 개발했다. 이 로봇의 길이는 10cm 정도로 초당 30m의 거리를 이동할 수 있다. 무게 10g의 소형카메라를 장착했으며 광센서, 장애물 감지 센서를 갖췄다. 스파이 로봇이나 재난현장에서 인명수색 작업 등에 활용 가능하다.
로봇과학자들은 자연계에 있는 소형 동물의 놀라운 능력에 주목하고 있다. 가령 ‘맨티스 쉬림프(Mantis shrimp)’라는 이름의 갯가재는 해머처럼 강력한 입을 갖고 있어 시속 111km의 속도로 해머질을 하면서 딱딱한 조개 껍질을 깨뜨린다. ‘히드라(Hydra)’라는 물속 생물은 총알보다 100배 빠른 속도로 독침을 연속 발사할수 있다. 미국 듀크대 ‘실라 파텍(Sheila Patek)’ 교수팀은 자연계의 작은 생물들이 놀라운 능력을 발휘하는 이유는 강력한 근육 보다는 스프링과 같은 구조에 있다는 연구 결과를 발표했다. 시위를 당긴 활에서 손을 놓으면 폭발적인 힘이 생기는 것처럼 작은 생물들도 유사한 구조를 갖고 있다는 것이다.
UC버클리 산하 생체모방연구소(Biomimetic Millisystems Lab)는 아프리카 여우 원숭이 일종인 ‘갈라고’에 주목했다. 갈라고는 몸무게가 작은 동물이지만 한번에 2m 가까운 높이를 점프할 수 있다. 이 같은 점핑 동작을 짧은 시간에 반복적으로 할 수 있다. UC버클리 연구진은 갈라고의 탁월한 점핑 능력을 모방한 점핑 로봇 ‘살토(SALTO)’를 개발했다.
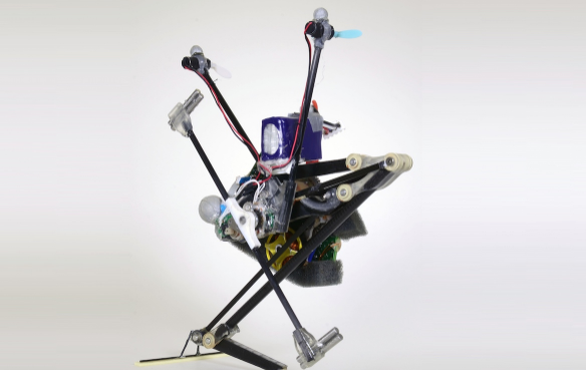
▲ 살토
뱀도 가장 생체 모방이 많이 이뤄지는 동물중 하나다. 뱀의 유연성과 빠른 움직임은 로봇 과학자들의 영감의 원천이다. 로봇 강국 일본도 뱀을 모사한 로봇 개발에 열중하고 있는데 일본 전기통신대학 '다나카 모토야쓰(田中基康)' 교수팀은 가나자와대학(金沢大学) 연구팀과 공동으로 플랜트 점검용 뱀 로봇을 개발했다. 배관 틈새 등 좁은 공간으로 진입할 수 있으며 1m 높이의 책상이나 계단을 쉽게 돌파할 수 있다. '
카티아 베르톨디(Katia Bertoldi)' 등 하버드대 로봇 과학자들은 뱀의 탁월한 이동 능력의 비밀이 뱀 피부에 있는 기하학적인 비늘 구조와 패턴에서 유래한다고 보고 뱀의 피부와 비늘을 모사한 인공 피부와 소프트 액추에이터를 개발했다.

▲ 일본 전기통신대 뱀 로봇
수중 동물도 생체 모방 로봇의 연구 대상이다. 하버드대 케빈 키트 파커 교수 ,최정우 서강대 화공생명공학과 교수 등 연구진은 내부의 동력기관 없이 물속에서 유영하는 가오리 형태의 바이오 로봇을 개발했다. 가오리의 생체 구조를 모사해 만든 이번 로봇은 고분자 탄성 중합체(polydimethylsiloxane, PDMS)로 구성된 몸체에 금을 증착해서 뼈대를 구성하고, 그 뼈대에 쥐의 심근세포를 배양해 바이오 로봇의 근육조직을 만들었다. 물속에서 유영하는 움직임은 실제 가오리와 유사하며 최대 2.5mm/sec의 속도로 움직일 수 있다.

▲ 하버드대 뱀 로봇
서울대학교 기계항공공학부 김호영, 조규진 교수 연구팀은 소금쟁이가 수면에서 도약할 때 표면장력을 최대한 이용하는 방식을 응용해 소금쟁이와 유사한 수상 도약 로봇을 개발하기도 했다.

▲ 소금쟁이 로봇
아예 살아 있는 동물과 로봇공학의 접목을 시도하는 연구도 진행되고 있다. 미국 매사추세츠주 캠브리지에 위치한 연구개발 전문업체인 ‘드레이퍼(Draper)’는 살아있는 잠자리를 사이보그 잠자리로 바꾸는 ‘드래곤플라이(DragonflEye) 프로젝트’를 추진하고 있다. 이 사이보그 잠자리는 태양광 패널, 광단자, 내비게이션 시스템 등으로 구성된 백팩(backpack)을 탑재하고 있다. 기존 사이보그 곤충 프로젝트의 경우 탑재하는 전자장치의 크기가 커 내비게이션 기능을 추가로 제공하는 게 힘들어 외부에서 원격 제어하는 게 일반적이었다. 이에 비해 드래곤플라이 프로젝트는 내비게이션 기능을 자체적으로 탑재, 자율비행이 가능하다.

▲ 사이보그 잠자리
생체 모방 로봇은 이제 살아 있는 동물과의 접목으로 진화하고 있는 단계에 이르렀다. 이와 함께 살아 있는 동물을 모사한 로봇에 인공지능을 탑재하려는 시도도 이뤄지고 있다. 미 워싱턴대(University of Washington)와 알렌 AI연구소(Allen Institute for AI)는 실제 개처럼 반응하는 인공지능을 개발 중이다.
그들은 개가 공원 등에서 마음껏 놀도록 해놓고 고프로(GoPro)와 마이크를 머리에, 관성 센서를 몸과 다리, 꼬리에, 아두이노 유닛을 등에 부착해 데이터를 수집하고 처리했다. 이렇게 수집한 데이터를 기반으로 인공지능을 개발하는 것이다. 이 인공지능은 개의 움직임을 예측하고, 개 행동을 학습한다. 이 인공지능은 앞으로 실제 로봇 개에 적용될 가능성이 있다. 그렇게 되면 실제 동물과 로봇 동물과의 구분이 힘들어지는 날이 올 수 있다.

▲ 개의 동작을 학습하는 인공지능 개발 과정
장길수 ksjang@irobotnews.com






