- 개발자 컨퍼런스 'DEVIEW 2017'에서 로봇 공개
네이버가 개발자 컨퍼런스인 ‘DEVIEW 2017’에서 자사가 개발하고 있는 로봇 모델을 공개했다. 송창현 네이버랩스 CEO 겸 네이버 CTO는 키노트를 통해 ‘도구와 정보들이 넘치는 세상에서, 기술은 사람과 생활환경을 더 잘 이해해야 한다. 기술의 진정한 가치는 기술이 생활 속으로 사라졌을 때 나온다’는 말로 생활환경지능 연구의 이유를 재차 강조했다.
이날 발표된 로봇 기술의 핵심은 '로케이션(location)과 모빌리티(mobility) 연구를 통해 일상으로 확장되는 생활환경지능’이다. 이날 발표된 주요 로봇 기술들을 소개한다.
자율주행 로봇 서비스의 대중화를 위한 M1, 맵 클라우드(map cloud) & 어라운드(AROUND)
이번에 네이버는 자율주행 서비스 로봇 ‘어라운드(AROUND)’를 발표했다. 어라운드는 실내 자율주행 로봇이다. 지도 생성은 지난해 발표한 ‘M1’ 로봇이, 위치 파악과 경로 생성은 맵 클라우드(map cloud)가 맡는다. 어라운드 본체는 저가의 센서와 낮은 프로세싱 파워로 장애물 회피 등의 기본적인 기능만 갖추고도 정확도 높은 자율주행을 할 수 있다.

이러한 솔루션을 바탕으로 로봇의 제작 비용을 큰 폭으로 낮출 수 있기 때문에 사람들의 삶 가까이에서 도움을 제공할 수 있는 실내 자율주행 서비스 로봇의 대량 보급이 가능해진다. 또한, 공간의 특성이나 목적에 맞는 형태의 로봇으로 쉽게 커스터마이징하여 설계/제작할 수 있기 때문에 향후 다양한 방식과 형태의 서비스를 제공할 수 있을 것으로 기대된다. 어라운드는 부산의 복합 공간 F1963에 위치한 YES24 오프라인 서점에서 직원과 고객들에게 도움을 주며 실제 사용되고 있다.
위치측위에 특화된 생활환경지능 디바이스 AKI
네이버는 위치측위에 특화된 생활환경지능 디바이스 'AKI'를 공개했다. AKI는 초등학교 저학년 아이와 부모 사이에서 비롯되는 관계에 주목, 부모와 아이의 공간/위치에 따른 상황을 이해해, 필요한 정보와 서비스를 적시에 제공할 수 있도록 제작되었다.

▲ AKI
AKI는 실내에서도 정확한 위치를 제공하는 자체 WPS DB, 행동을 인지하여 자동으로 조절되는 저전력 위치 탐지, 그리고 위치 개인화(personalized Wi-Fi fingerprinting) 등의 정확한 위치측위 관련 기술이 적용되었다. 아이의 위치를 정확히 파악하고, 아이가 이동중인 상황을 인지(activity detector, move classifier)한다. 아이가 반복적으로 방문하고 머무는 장소/시간/상황을 분석해 아이의 생활 패턴을 학습하여, 이동 상태 확인이나 비정상 알림과 같이 부모가 아이에 대해 알고 싶은 정보들을 적시에 제공할 수 있도록 설계했다.
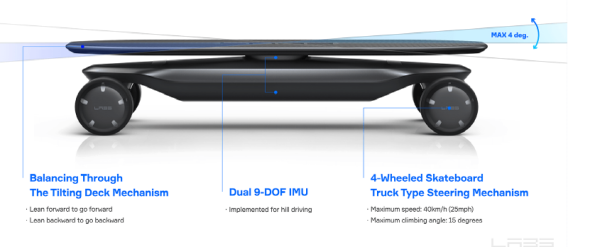
세계 최초 4륜 밸런싱 전동 스케이트보드
네이버는 세계 최초로 4륜 밸런싱 기술이 적용된 전동 스케이트보드를 소개했다. 이 보드는 사람이 단순히 몸을 기울이는 것만으로 가속, 감속, 방향 전환이 모두 가능하며, 4륜 지지 구조를 갖추고 있어 안정성이 높고, 40km/hr 이상으로 고속 주행할 수 있다. 두 개의 기울기센서를 이용해 1초에 1000번 기울기를 측정하여 무게중심을 항상 제어하기 때문에 급격한 가감속시에도 안정적이며 경사로 주행도 가능하다.
근력증강 웨어러블 로봇 기술 응용한 ‘에어카트(AIRCART)’
에어카트(AIRCART)는 우리와 가장 가까운 일상의 공간에서 노동의 어려움을 덜어주기 위해 시작된 프로젝트다. 근력증강 웨어러블 로봇에 사용되는 ‘physical human-robot interaction(pHRI)’ 기술이 적용되었다. 운전자의 조작 의도를 카트 손잡이에 달린 힘센서에서 파악해 실시간으로 카트의 움직임(추진력과 방향)을 제어하기 때문에 누구든 따로 조작 방법을 배울 필요없이 직관적인 사용이 가능한 것이 특징이다. 특히 더 위험할 수 있는 내리막길에서도 자동 브레이크 시스템으로 안전하게 이동할 수 있다. 에어카트는 어라운드와 함께 YES24 오프라인 서점에서 실제 사용되고 있다.
자율주행차, 연내 도심지에서 SAE 4단계 달성 목표

자율주행차 연구는 도심 내 GPS 음영지역에서도 자율주행이 가능하도록 차선 기반 자기 위치 인식 연구를 강화했으며 KAIST와 산학협력으로 대단위 도심 지역에서 빠르고 정확하게 도로와 표지판 정보 등을 자동으로 추출하는 연구도 착수했다.
계단을 비롯한 다양한 생활환경에서의 이동성 연구
MIT와 협력 중인 치타(Cheetah 3), 일리노이대학교(UIUC)와 협력 중인 점핑 로봇( Jumping robot)은 생활 환경 내에서 계단과 같은 단차를 극복하며 자연스럽게 이동할 수 있는 다리 로봇 개발을 위한 장기 산학 연구 과제로 진행 중이다. 계단을 올라가는 바퀴 달린 로봇 터스크봇(Tuskbot), 물체 인식 및 자율주행하는 TT-bot이 네이버랩스의 인턴 프로젝트로 함께 소개되었다.
일상으로 팔을 뻗는 로봇팔 앰비덱스(AMBIDEX)
앰비덱스는 실생활에서 사람과 자연스럽게 인터렉션하며 다양한 노동력과 서비스를 제공하기 위한 목적으로 네이버랩스와 한국기술교육대학교(Koreatech)가 장기 산학 연구 중인 로봇팔이다. 네이버랩스는 로봇팔을 일상의 영역으로 활용범위를 확대하기 위해 하드웨어/제어/인식/지능 등에 대해 연구하며 세계 최고 수준의 로봇팔 메커니즘 설계능력을 갖춘 한국기술교육대 김용재 교수와 산학협력을 통해 사람의 팔보다도 가볍고, 사람과의 접촉에서도 안전한 앰비덱스를 제작해 공개했다.
앰비덱스는 팔의 경량화를 위해서 무거운 구동기는 모두 어깨와 몸체 부분에 배치하고, 와이어를 이용해서 가벼운 팔을 구동하는 독창적인 와이어 구조를 가지고 있으며, 모든 관절에 강도/강성을 증폭하는 혁신적인 동력 전달 메커니즘을 적용해, 기존 산업용 로봇과 유사한 수준의 제어 성능과 정밀도를 갖췄다.

▲ 앰비덱스
장길수 ksjang@irobotnews.com






